Продолжение книги «Кто есть кто в робототехнике» ("Компоненты и решения для создания роботов и робототехнических систем") - ISBN 5-9706-0013-X. Люди и предприятия, упомянутые в справочнике (их перечень продолжает пополняться), так или иначе внесли свой вклад в развитие робототехники.
Специальная тема -
Телевизионная система для контрастирования защитно окрашенных объектов |
 Блок-схема спектрозональной системы с анализом излучения на метамеризм
Блок-схема спектрозональной системы с анализом излучения на метамеризм
Серия сообщений "Роботизация":Роботы в вашей среде обитанияЧасть 1 - Об эффективности видеотехнологий в робототехнических системах
Часть 2 - Будущее электронного зрения
...
Часть 16 - Определение координат регистрируемых объектов
Часть 17 - Эпиполярная навигация
Часть 18 - Телевизионная система для контрастирования защитно окрашенных объектов
Часть 19 - Контроль больших площадей земной и водной поверхностей
Часть 20 - Малогабаритный авиационный сканер
...
Часть 48 - Беспилотные фуры: трансконтинентальный транзит
Часть 49 - Помогает ли «социальный рейтинг» Китаю бороться с пандемией?
Часть 50 - Внешность какой киноактрисы предпочтительнее для женщины-робота?
Серия сообщений "Видео и ТВ-техника":Антенны, телевизоры, оборудованиеЧасть 1 - Экспозиция высокоточных приводов
Часть 2 - Миллион условненьких единичек в день
...
Часть 11 - Электронный контрастор
Часть 12 - Изображения объектов в терагерцовом диапазоне
Часть 13 - Телевизионная система для контрастирования защитно окрашенных объектов
Часть 14 - Контроль больших площадей земной и водной поверхностей
Часть 15 - Малогабаритный авиационный сканер
...
Часть 48 - Измеритель светового коэффициента пропускания автомобильных стекол
Часть 49 - АВТОМОБИЛЬ ДОСТАВИТ ГРУЗ ПО ВОДЕ И ПОСУХУ
Часть 50 - Умный дом: управление системой освещения
|
Метки: метамеризм изомерны или разноспектральны повышения различимости |
Работы в условиях сложного освещения |
 Пример телевизионного наблюдения посредством комбинированного изображения приведён на рисунке. Стрелка сверху - изображение в "окне"; стрелка снизу - изображение вне "окна".
Пример телевизионного наблюдения посредством комбинированного изображения приведён на рисунке. Стрелка сверху - изображение в "окне"; стрелка снизу - изображение вне "окна". Ниже изложено техническое решение поставленной задачи. Структурная схема телекамеры изображена справа. Телекамера содержит последовательно расположенные и оптически связанные объектив (1) и светоделитель (2), первый датчик телевизионного сигнала (3), второй датчик телевизионного сигнала (4) и коммутатор-смеситель (5).
Ниже изложено техническое решение поставленной задачи. Структурная схема телекамеры изображена справа. Телекамера содержит последовательно расположенные и оптически связанные объектив (1) и светоделитель (2), первый датчик телевизионного сигнала (3), второй датчик телевизионного сигнала (4) и коммутатор-смеситель (5). Для АРЧ каждого из датчиков предусмотрена предустановка разных и взаимоисключающих областей фотометрирования, которые показаны на рисунке. Для датчика (3) областью фотометрирования является центральная область его фотомишени (см. рис. 3 - левая часть), а для датчика (4) – вся область его фото-мишени минус центральная (см. рис. 3 - правая часть). Отметим, что размеры и местоположение области фотометрирования датчика (3) определяют размещение в кадре сигнала «окошко», а, следовательно, площадь «окна» и его положение в комбинированном изображении.
Для АРЧ каждого из датчиков предусмотрена предустановка разных и взаимоисключающих областей фотометрирования, которые показаны на рисунке. Для датчика (3) областью фотометрирования является центральная область его фотомишени (см. рис. 3 - левая часть), а для датчика (4) – вся область его фото-мишени минус центральная (см. рис. 3 - правая часть). Отметим, что размеры и местоположение области фотометрирования датчика (3) определяют размещение в кадре сигнала «окошко», а, следовательно, площадь «окна» и его положение в комбинированном изображении.
Серия сообщений "Светотехника":светильники, средаЧасть 1 - Расчет режима освещенности
Часть 2 - Равномерность подсветки зоны наблюдения
Часть 3 - Работы в условиях сложного освещения
Часть 4 - Особенности техники освещения
Часть 5 - Изготовить белый или золотистый отражатель
...
Часть 13 - Умный дом: управление системой освещения
Часть 14 - Светодиоды на «Связь-Экспокомм-2001»
Часть 15 - Осветительные модули
|
Метки: искажения видеосигнала режим компенсации искажений площади растра фотомишень |
Вероятность распознавания объектов телевизионной аппаратурой |
 Купольная видеокамера серии WV-CS950 оснащена функцией автоматического слежения, принцип действия которой проиллюстрирован на снимках: показано, каким образом камера автоматически следует за движущимся объектом в кадре (она отслеживает самый крупный объект), стараясь удерживать объект в центре кадра.
Купольная видеокамера серии WV-CS950 оснащена функцией автоматического слежения, принцип действия которой проиллюстрирован на снимках: показано, каким образом камера автоматически следует за движущимся объектом в кадре (она отслеживает самый крупный объект), стараясь удерживать объект в центре кадра.  В данном случае этот объект – робот: автомобильчик с датчиком препятствий, позволяющим ему всё время двигаться внутри прозрачного ящика. Подробнее о камерах названной серии см. в справочнике "Кто есть кто в робототехнике", выпуск № 1.
В данном случае этот объект – робот: автомобильчик с датчиком препятствий, позволяющим ему всё время двигаться внутри прозрачного ящика. Подробнее о камерах названной серии см. в справочнике "Кто есть кто в робототехнике", выпуск № 1.
Серия сообщений "Распознавание образов":распознавание лиц, мимики, жестов, звуков и пр.Часть 1 - Вероятность распознавания объектов телевизионной аппаратурой
Часть 2 - Распознавание мимики и жестов в борьбе с курением и выплёвыванием жевательной резинки
Часть 3 - Распознавание людей по пальцам ног и ступням
...
Часть 42 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 24-я
Часть 43 - Парковочное место и его юридический статус
Часть 44 - Безопасность и неприкосновенность парковки автомобиля возле дома или офиса
|
Метки: критерий Джонсона Обнаружение у Ллойда |
Оптико-электронная аппаратура беспилотного авиационного комплекса |
 Снимок с борта воздушного змея крылатских змеенавтов
Снимок с борта воздушного змея крылатских змеенавтов
Серия сообщений "Беспилотные летательные аппараты":беспилотники, БЛА, БПЛАЧасть 1 - ЛЕТАЮЩИЙ РОБОТ
Часть 2 - Авиароботы для видеосъёмки с высоты (Часть III)
...
Часть 6 - Способность роботов летать
Часть 7 - Телевизионные средства наблюдения беспилотных воздушных аппаратов
Часть 8 - Оптико-электронная аппаратура беспилотного авиационного комплекса
Часть 9 - Беспилотный вертолет следит за участниками протеста
Часть 10 - СОСТАВ БОРТОВОГО ОБОРУДОВАНИЯ СОВРЕМЕННЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БЛА)
...
Часть 39 - Беспроводная передача электроэнергии
Часть 40 - ЛЕТАЮ, ВИЖУ, СНИМАЮ: винтокрылые шпионы
Часть 41 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 24-я
|
Метки: Снимок с борта воздушного змея комплекс Outrider микросканирование |
Телевизионные средства наблюдения беспилотных воздушных аппаратов |
 Обнаружение и регистрация движущихся объектов малогабаритными ТВ камерами при различных высотах полёта беспилотных средств находятся в прямой зависимости от потециальной чувствительности телевизионных средств. В случае ограничения чувствительности телевизионной аппаратуры фотонными шумами фонового потока от подстилающей поверхности наблюдаемой местности предельная величина отношения сигнал/шум (при известной яркости фона Вф и величине квантового выхода используемого приёмника излучения Y) определяется выражением: ψ = EF|{YlD2вхtT/ d2крhuВф}0,5, где Е - облученность входного зрачка оптической системы телевизионной камеры регистрируемым объектом, F| -фокусное расстояние, Dвх - диаметр входного зрачка, dкр - диаметр кружка рассеяния (импульсная характеристика) объектива, t - эффективный коэффициент пропускания, h - постоянная Планка, u - частота, Т - время накопления (для ПЗС-матриц и телевизионных передающих трубок).
Обнаружение и регистрация движущихся объектов малогабаритными ТВ камерами при различных высотах полёта беспилотных средств находятся в прямой зависимости от потециальной чувствительности телевизионных средств. В случае ограничения чувствительности телевизионной аппаратуры фотонными шумами фонового потока от подстилающей поверхности наблюдаемой местности предельная величина отношения сигнал/шум (при известной яркости фона Вф и величине квантового выхода используемого приёмника излучения Y) определяется выражением: ψ = EF|{YlD2вхtT/ d2крhuВф}0,5, где Е - облученность входного зрачка оптической системы телевизионной камеры регистрируемым объектом, F| -фокусное расстояние, Dвх - диаметр входного зрачка, dкр - диаметр кружка рассеяния (импульсная характеристика) объектива, t - эффективный коэффициент пропускания, h - постоянная Планка, u - частота, Т - время накопления (для ПЗС-матриц и телевизионных передающих трубок).
Серия сообщений "Беспилотные летательные аппараты":беспилотники, БЛА, БПЛАЧасть 1 - ЛЕТАЮЩИЙ РОБОТ
Часть 2 - Авиароботы для видеосъёмки с высоты (Часть III)
...
Часть 5 - Дачно-сельскохозяйственный беспилотник
Часть 6 - Способность роботов летать
Часть 7 - Телевизионные средства наблюдения беспилотных воздушных аппаратов
Часть 8 - Оптико-электронная аппаратура беспилотного авиационного комплекса
Часть 9 - Беспилотный вертолет следит за участниками протеста
...
Часть 39 - Беспроводная передача электроэнергии
Часть 40 - ЛЕТАЮ, ВИЖУ, СНИМАЮ: винтокрылые шпионы
Часть 41 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 24-я
|
Метки: средства сверхсветосильных систем системы видеонаблюдения условия помех и переотражений |
Эпиполярная навигация |
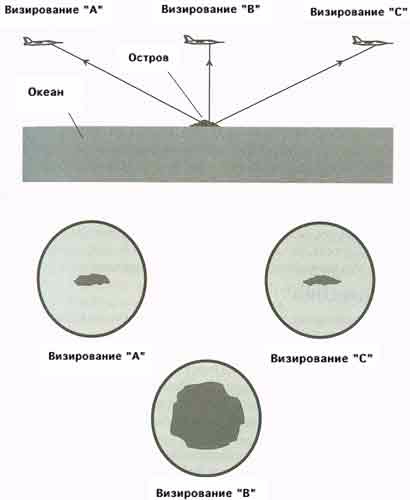 Авиаробот может проложить свой путь, обозревая остров и тщательно исследуя форму и угловой размер изображения острова.
Авиаробот может проложить свой путь, обозревая остров и тщательно исследуя форму и угловой размер изображения острова.
Серия сообщений "Роботизация":Роботы в вашей среде обитанияЧасть 1 - Об эффективности видеотехнологий в робототехнических системах
Часть 2 - Будущее электронного зрения
...
Часть 15 - Изображения объектов в терагерцовом диапазоне
Часть 16 - Определение координат регистрируемых объектов
Часть 17 - Эпиполярная навигация
Часть 18 - Телевизионная система для контрастирования защитно окрашенных объектов
Часть 19 - Контроль больших площадей земной и водной поверхностей
...
Часть 48 - Беспилотные фуры: трансконтинентальный транзит
Часть 49 - Помогает ли «социальный рейтинг» Китаю бороться с пандемией?
Часть 50 - Внешность какой киноактрисы предпочтительнее для женщины-робота?
Серия сообщений "Электроника":Электронные и радиотехнические устройства, практические схемыЧасть 1 - Помехи ИК-приборам дистанционного управления AV-аппаратурой
Часть 2 - Если посмотреть на работающий ускоритель частиц
...
Часть 10 - Изображения объектов в терагерцовом диапазоне
Часть 11 - Определение координат регистрируемых объектов
Часть 12 - Эпиполярная навигация
Часть 13 - ГЕНЕРАТОР ШУМА ПРИБОЯ
Часть 14 - ЭЛЕКТРОННЫЙ ПАСТУХ
...
Часть 47 - Сельская/дачная проституция проблематична без "электронных сутенёров"
Часть 48 - Умный дом сам отремонтирует бытовую технику: телевизор, микроволновку, чайник, смартфон
Часть 49 - Электроника и обучение собак
|
Метки: Эпиполярная навигация авиаробот |
Определение координат регистрируемых объектов |
 В качестве такой модели была выбрана пятиосная система (см. рис. Геометрическая модель пятиосного телевизионно-измерительного комплекса), включающая в себя трехосный телевизионный датчик и двухосный гиростабилизатор. Измерительные оси такой системы: "а-а", "b-b" и "l-l".
В качестве такой модели была выбрана пятиосная система (см. рис. Геометрическая модель пятиосного телевизионно-измерительного комплекса), включающая в себя трехосный телевизионный датчик и двухосный гиростабилизатор. Измерительные оси такой системы: "а-а", "b-b" и "l-l".
Серия сообщений "Роботизация":Роботы в вашей среде обитанияЧасть 1 - Об эффективности видеотехнологий в робототехнических системах
Часть 2 - Будущее электронного зрения
...
Часть 14 - Приборы дальнего наблюдения
Часть 15 - Изображения объектов в терагерцовом диапазоне
Часть 16 - Определение координат регистрируемых объектов
Часть 17 - Эпиполярная навигация
Часть 18 - Телевизионная система для контрастирования защитно окрашенных объектов
...
Часть 48 - Беспилотные фуры: трансконтинентальный транзит
Часть 49 - Помогает ли «социальный рейтинг» Китаю бороться с пандемией?
Часть 50 - Внешность какой киноактрисы предпочтительнее для женщины-робота?
Серия сообщений "Электроника":Электронные и радиотехнические устройства, практические схемыЧасть 1 - Помехи ИК-приборам дистанционного управления AV-аппаратурой
Часть 2 - Если посмотреть на работающий ускоритель частиц
...
Часть 9 - Электронный контрастор
Часть 10 - Изображения объектов в терагерцовом диапазоне
Часть 11 - Определение координат регистрируемых объектов
Часть 12 - Эпиполярная навигация
Часть 13 - ГЕНЕРАТОР ШУМА ПРИБОЯ
...
Часть 47 - Сельская/дачная проституция проблематична без "электронных сутенёров"
Часть 48 - Умный дом сам отремонтирует бытовую технику: телевизор, микроволновку, чайник, смартфон
Часть 49 - Электроника и обучение собак
|
Метки: дальномерный комплекс гиростабилизатор угломерно-поворотное устройство |
Камера со стеклоочистителем |

 Система для высотного видеонаблюдения с малообъёмного (45 м3) привязного (до 300 м) аэростата. Гиростабилизированная видеокамера имеет 26х оптическое увеличение и 12х цифровое увеличение. Стабилизация - трёхосная. Углы поворота - 360° (азимут), от +9° до -150° (тангаж). Вес - 5,2 кг, размеры - 360 х 360 х 340 мм. Выходной сигнал - PAL.
Система для высотного видеонаблюдения с малообъёмного (45 м3) привязного (до 300 м) аэростата. Гиростабилизированная видеокамера имеет 26х оптическое увеличение и 12х цифровое увеличение. Стабилизация - трёхосная. Углы поворота - 360° (азимут), от +9° до -150° (тангаж). Вес - 5,2 кг, размеры - 360 х 360 х 340 мм. Выходной сигнал - PAL.
Метки: Камера со стеклоочистителем Гиростабилизированная видеокамера оптическое увеличение |
Изображения объектов в терагерцовом диапазоне |
 Схема экспериментальной установки для генерации и регистрации дальнего ИК излучения с помощью фемтосекундных лазерных импульсов. Обозначения на схеме: СД - светоделитель; Г и П - соответственно генератор и приемник низкочастотного излучения: кристаллы ZnТе толщиной 1 мм и ориентацией <110>; Ф - фильтр из фторопласта ФТ-4; О - двухкоординатная подвижка с размещенным на ней образцом ; λ/4 - фазовая пластинка; ПВ - призма Волластона.
Схема экспериментальной установки для генерации и регистрации дальнего ИК излучения с помощью фемтосекундных лазерных импульсов. Обозначения на схеме: СД - светоделитель; Г и П - соответственно генератор и приемник низкочастотного излучения: кристаллы ZnТе толщиной 1 мм и ориентацией <110>; Ф - фильтр из фторопласта ФТ-4; О - двухкоординатная подвижка с размещенным на ней образцом ; λ/4 - фазовая пластинка; ПВ - призма Волластона.  В качестве примера результат, полученный при сканировании тефлонового кольца, представлен на рисунке. Изображение кольца из тефлона и его проекции в терагерцовом и оптическом диапазоне длин волн, соответственно
В качестве примера результат, полученный при сканировании тефлонового кольца, представлен на рисунке. Изображение кольца из тефлона и его проекции в терагерцовом и оптическом диапазоне длин волн, соответственно
Серия сообщений "Роботизация":Роботы в вашей среде обитанияЧасть 1 - Об эффективности видеотехнологий в робототехнических системах
Часть 2 - Будущее электронного зрения
...
Часть 13 - Определение рациональных коэффициентов компрессии
Часть 14 - Приборы дальнего наблюдения
Часть 15 - Изображения объектов в терагерцовом диапазоне
Часть 16 - Определение координат регистрируемых объектов
Часть 17 - Эпиполярная навигация
...
Часть 48 - Беспилотные фуры: трансконтинентальный транзит
Часть 49 - Помогает ли «социальный рейтинг» Китаю бороться с пандемией?
Часть 50 - Внешность какой киноактрисы предпочтительнее для женщины-робота?
Серия сообщений "Видео и ТВ-техника":Антенны, телевизоры, оборудованиеЧасть 1 - Экспозиция высокоточных приводов
Часть 2 - Миллион условненьких единичек в день
...
Часть 10 - Насадки для камер
Часть 11 - Электронный контрастор
Часть 12 - Изображения объектов в терагерцовом диапазоне
Часть 13 - Телевизионная система для контрастирования защитно окрашенных объектов
Часть 14 - Контроль больших площадей земной и водной поверхностей
...
Часть 48 - Измеритель светового коэффициента пропускания автомобильных стекол
Часть 49 - АВТОМОБИЛЬ ДОСТАВИТ ГРУЗ ПО ВОДЕ И ПОСУХУ
Часть 50 - Умный дом: управление системой освещения
Серия сообщений "Электроника":Электронные и радиотехнические устройства, практические схемыЧасть 1 - Помехи ИК-приборам дистанционного управления AV-аппаратурой
Часть 2 - Если посмотреть на работающий ускоритель частиц
...
Часть 8 - Определение рациональных коэффициентов компрессии
Часть 9 - Электронный контрастор
Часть 10 - Изображения объектов в терагерцовом диапазоне
Часть 11 - Определение координат регистрируемых объектов
Часть 12 - Эпиполярная навигация
...
Часть 47 - Сельская/дачная проституция проблематична без "электронных сутенёров"
Часть 48 - Умный дом сам отремонтирует бытовую технику: телевизор, микроволновку, чайник, смартфон
Часть 49 - Электроника и обучение собак
|
Метки: светоделитель импульс терагерцового излучения призмы Волластона |
Приборы дальнего наблюдения |
 серии «Циклон-DN/TV». Основные технические характеристики: дальность обнаружения при метеорологической дальности видимости 15 км объекта типа: «человек» - 4,5 км; «танк» - 12 км; дальность распознавания при метеорологической дальности видимости 15 км объекта типа: «человек» - 1,5 км; «танк» - 4,5км; спектральный диапазон - 0,4-0,9 мкм; угловое поле - 2,4° - 40° (верт.), 1,8°- 30° (гор.); пределы изменения фокусного расстояния вариообъектива - 8 - 160 мм; разрешающая способность системы - 40 лин./мм; параметры выходного видеосигнала - 1В, 75 Ом; габаритные размеры прибора разведки (вместе с термокожухом) – 120 х 200 х 450 мм; дальность действия телевизионной и телеметрической приемо-передающей аппаратуры (в условиях прямой видимости) - 2,5 км; масса - 8 кг; диапазон рабочих температур - от +45 до -45 °С; напряжение питания ~ 220 / 24 В; потребляемая мощность - 70 Вт.
серии «Циклон-DN/TV». Основные технические характеристики: дальность обнаружения при метеорологической дальности видимости 15 км объекта типа: «человек» - 4,5 км; «танк» - 12 км; дальность распознавания при метеорологической дальности видимости 15 км объекта типа: «человек» - 1,5 км; «танк» - 4,5км; спектральный диапазон - 0,4-0,9 мкм; угловое поле - 2,4° - 40° (верт.), 1,8°- 30° (гор.); пределы изменения фокусного расстояния вариообъектива - 8 - 160 мм; разрешающая способность системы - 40 лин./мм; параметры выходного видеосигнала - 1В, 75 Ом; габаритные размеры прибора разведки (вместе с термокожухом) – 120 х 200 х 450 мм; дальность действия телевизионной и телеметрической приемо-передающей аппаратуры (в условиях прямой видимости) - 2,5 км; масса - 8 кг; диапазон рабочих температур - от +45 до -45 °С; напряжение питания ~ 220 / 24 В; потребляемая мощность - 70 Вт.
Серия сообщений "Роботизация":Роботы в вашей среде обитанияЧасть 1 - Об эффективности видеотехнологий в робототехнических системах
Часть 2 - Будущее электронного зрения
...
Часть 12 - Управление следящей системой
Часть 13 - Определение рациональных коэффициентов компрессии
Часть 14 - Приборы дальнего наблюдения
Часть 15 - Изображения объектов в терагерцовом диапазоне
Часть 16 - Определение координат регистрируемых объектов
...
Часть 48 - Беспилотные фуры: трансконтинентальный транзит
Часть 49 - Помогает ли «социальный рейтинг» Китаю бороться с пандемией?
Часть 50 - Внешность какой киноактрисы предпочтительнее для женщины-робота?
|
Метки: угловое поле термокожух классификатор изображений |






