Проблемы чувствительности и разрешения малогабаритных телевизионных средств наблюдения с низкоорбитальных беспилотных воздушных аппаратов
Фрагмент 3-го выпуска справочника "Кто есть кто в робототехнике"
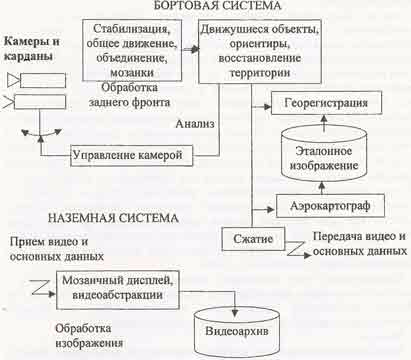
Решение задачи получения видеоинформации с беспилотных средств космической и авиааппаратуры в реальном масштабе времени при обнаружении и определении местоположения движущихся объектов (если априорно координаты этих объектов неизвестны) требует особой методики (при пространственном сканировании местности с беспилотных средств) пространственно-временного анализа изображений, учитывающей как статические, так и динамические характеристики регистрируемого объекта и окружающего его фона. Разработку методики пространственно-временного анализа видеоизображений целесообразно осуществлять для системы, представленной на рисунке Компоненты воздушной системы видеонаблюдения для использования с беспилотным летательным аппаратом. При разработке данной методики необходимо решить следующие вопросы:
1. обнаружение и отслеживание движущихся объектов на фоне трёхмерной местности и сопутствующих помех;
2. реализация потенциальной чувствительности и предельно возможного разрешения малогабаритными телевизионными камерами;
3. привязка координат видеоизображений и отслеживаемых объектов к эталонному изображению трёхмерной модели местности;
4. масштабирование, в увеличенных размерах, видеоизображения и его наложение на эталонное изображение и карту местности;
5. передача и приём информации по радиоканалу в условиях помех и переотражений.
Обнаружение и регистрация движущихся объектов малогабаритными ТВ камерами при различных высотах полёта беспилотных средств находятся в прямой зависимости от потециальной чувствительности телевизионных средств. В случае ограничения чувствительности телевизионной аппаратуры фотонными шумами фонового потока от подстилающей поверхности наблюдаемой местности предельная величина отношения сигнал/шум (при известной яркости фона Вф и величине квантового выхода используемого приёмника излучения Y) определяется выражением: ψ = EF|{YlD2вхtT/ d2крhuВф}0,5, где Е - облученность входного зрачка оптической системы телевизионной камеры регистрируемым объектом, F| -фокусное расстояние, Dвх - диаметр входного зрачка, dкр - диаметр кружка рассеяния (импульсная характеристика) объектива, t - эффективный коэффициент пропускания, h - постоянная Планка, u - частота, Т - время накопления (для ПЗС-матриц и телевизионных передающих трубок).
Анализ формулы позволяет констатировать, что в малогабаритных ТВ камерах, т. е. при малом значении F| потенциальная чувствительность находится в прямой зависимости от диаметра входного зрачка оптической системы и в обратной зависимости от диаметра её кружка рассеяния при постоянных излучательной способности регистрируемого объекта и постоянной яркости мешающего фона. Таким образом подтверждается факт необходимости применения в телевизионных беспилотных средствах сверхсветосильных оптических систем безаберрационного качества. Размер дифракционного кружка рассеяния (в случае использования безаберрационной оптики) определяется из выражения: dкр = 2,44l F|/ Dвх, где l - длина волны регистрируемого излучения. По докладу Семенова А. А., Смирнова В. Д. на XI Всероссийской научно-технической конференции «Современное телевидение»
Серия сообщений "Беспилотные летательные аппараты":беспилотники, БЛА, БПЛА
Часть 1 - ЛЕТАЮЩИЙ РОБОТ
Часть 2 - Авиароботы для видеосъёмки с высоты (Часть III)
...
Часть 5 - Дачно-сельскохозяйственный беспилотник
Часть 6 - Способность роботов летать
Часть 7 - Телевизионные средства наблюдения беспилотных воздушных аппаратов
Часть 8 - Оптико-электронная аппаратура беспилотного авиационного комплекса
Часть 9 - Беспилотный вертолет следит за участниками протеста
...
Часть 39 - Беспроводная передача электроэнергии
Часть 40 - ЛЕТАЮ, ВИЖУ, СНИМАЮ: винтокрылые шпионы
Часть 41 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 24-я
 Обнаружение и регистрация движущихся объектов малогабаритными ТВ камерами при различных высотах полёта беспилотных средств находятся в прямой зависимости от потециальной чувствительности телевизионных средств. В случае ограничения чувствительности телевизионной аппаратуры фотонными шумами фонового потока от подстилающей поверхности наблюдаемой местности предельная величина отношения сигнал/шум (при известной яркости фона Вф и величине квантового выхода используемого приёмника излучения Y) определяется выражением: ψ = EF|{YlD2вхtT/ d2крhuВф}0,5, где Е - облученность входного зрачка оптической системы телевизионной камеры регистрируемым объектом, F| -фокусное расстояние, Dвх - диаметр входного зрачка, dкр - диаметр кружка рассеяния (импульсная характеристика) объектива, t - эффективный коэффициент пропускания, h - постоянная Планка, u - частота, Т - время накопления (для ПЗС-матриц и телевизионных передающих трубок).
Обнаружение и регистрация движущихся объектов малогабаритными ТВ камерами при различных высотах полёта беспилотных средств находятся в прямой зависимости от потециальной чувствительности телевизионных средств. В случае ограничения чувствительности телевизионной аппаратуры фотонными шумами фонового потока от подстилающей поверхности наблюдаемой местности предельная величина отношения сигнал/шум (при известной яркости фона Вф и величине квантового выхода используемого приёмника излучения Y) определяется выражением: ψ = EF|{YlD2вхtT/ d2крhuВф}0,5, где Е - облученность входного зрачка оптической системы телевизионной камеры регистрируемым объектом, F| -фокусное расстояние, Dвх - диаметр входного зрачка, dкр - диаметр кружка рассеяния (импульсная характеристика) объектива, t - эффективный коэффициент пропускания, h - постоянная Планка, u - частота, Т - время накопления (для ПЗС-матриц и телевизионных передающих трубок). 





