Понедельник, 23 Января 2017 г. 16:23
+ в цитатник
Фрагмент 3-го выпуска справочника "Кто есть кто в робототехнике"
– совокупность средств, благодаря которым машина может определять местонахождение объектов в трехмерном пространстве. Посредством эпиполярной навигации можно управлять машиной, вычислять её положение и траекторию. Эпиполярная навигация работает, оценивая, как изменяется изображение пути, рассматривая его с перемещающейся точки обзора. Чтобы проиллюстрировать эпиполярную навигацию, вообразим автоматизированный беспилотный самолет, летящий над океаном. Единственная земля под авиароботом - маленький остров. Управляющая система авиаробота снабжена электронной картой с высокой степенью детализации, которая показывает местоположение, размер, и точную форму этого острова. Из аппаратуры авиароботу достаточно иметь только компьютер, хорошую видеокамеру, и специализированное программное обеспечение.
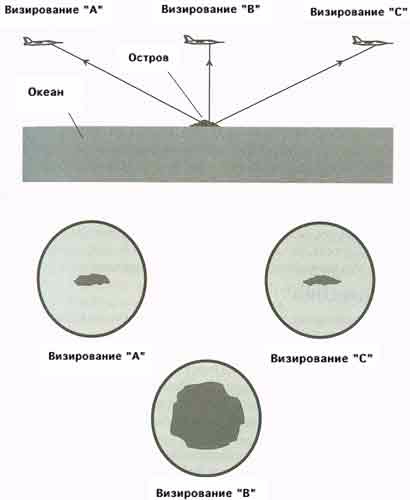
Авиаробот может проложить свой путь, обозревая остров и тщательно исследуя форму и угловой размер изображения острова.
Во время, когда авиаробот совершает последовательное движение вперёд, остров выглядит движущимся под ним. Камера фиксирует остров. Система управления “видит” изображение, которое постоянно изменяет форму и угловой размер. Контроллер запрограммирован на истинные размер, форму, ориентацию, и географическое местоположение острова. Он сравнивает форму/размер изображения, которое “видит” из точки нахождения самолета, с фактической формой/размером острова, который он "знает" по данным карты. Благодаря этому авиаробот может самостоятельно определять: высоту, скорость перемещения относительно поверхности, направление этого перемещения, географические широту и долготу. Эпиполярная навигация, в теории, может работать в любом масштабе, и при любой скорости – даже близкой к скорости света. Это - метод, которым роботы могут находить свой путь без триангуляции, наведения на цель, маяков, звуковых сигналов, или радара. Для этого, однако, необходимо, чтобы робот имел детальную и точную компьютерную карту окружающей его среды.
Серия сообщений "Роботизация":Роботы в вашей среде обитания
Часть 1 - Об эффективности видеотехнологий в робототехнических системах
Часть 2 - Будущее электронного зрения
...
Часть 15 - Изображения объектов в терагерцовом диапазоне
Часть 16 - Определение координат регистрируемых объектов
Часть 17 - Эпиполярная навигация
Часть 18 - Телевизионная система для контрастирования защитно окрашенных объектов
Часть 19 - Контроль больших площадей земной и водной поверхностей
...
Часть 48 - Беспилотные фуры: трансконтинентальный транзит
Часть 49 - Помогает ли «социальный рейтинг» Китаю бороться с пандемией?
Часть 50 - Внешность какой киноактрисы предпочтительнее для женщины-робота?
Серия сообщений "Электроника":Электронные и радиотехнические устройства, практические схемы
Часть 1 - Помехи ИК-приборам дистанционного управления AV-аппаратурой
Часть 2 - Если посмотреть на работающий ускоритель частиц
...
Часть 10 - Изображения объектов в терагерцовом диапазоне
Часть 11 - Определение координат регистрируемых объектов
Часть 12 - Эпиполярная навигация
Часть 13 - ГЕНЕРАТОР ШУМА ПРИБОЯ
Часть 14 - ЭЛЕКТРОННЫЙ ПАСТУХ
...
Часть 47 - Сельская/дачная проституция проблематична без "электронных сутенёров"
Часть 48 - Умный дом сам отремонтирует бытовую технику: телевизор, микроволновку, чайник, смартфон
Часть 49 - Электроника и обучение собак
Метки:
Эпиполярная навигация
авиаробот
-
Запись понравилась
-
0
Процитировали
-
0
Сохранили
-
 Авиаробот может проложить свой путь, обозревая остров и тщательно исследуя форму и угловой размер изображения острова.
Авиаробот может проложить свой путь, обозревая остров и тщательно исследуя форму и угловой размер изображения острова.





