Продолжение книги «Кто есть кто в робототехнике» ("Компоненты и решения для создания роботов и робототехнических систем") - ISBN 5-9706-0013-X. Люди и предприятия, упомянутые в справочнике (их перечень продолжает пополняться), так или иначе внесли свой вклад в развитие робототехники.
Специальная тема -
Электронный контрастор |
 Промышленная видеоскопическая система IPLEX осуществляет измерение габаритных размеров, глубины/высоты, площади, а также отображение профиля поперечного сечения повреждений и дефектов. Технология трёхмерных измерений основана на том, что изображение формируется двумя объективами, чем обеспечивается точность измерения глубины. Ось объектива видеоскопа не обязательно должна располагаться перпендикулярно поверхности измеряемого дефекта.
Промышленная видеоскопическая система IPLEX осуществляет измерение габаритных размеров, глубины/высоты, площади, а также отображение профиля поперечного сечения повреждений и дефектов. Технология трёхмерных измерений основана на том, что изображение формируется двумя объективами, чем обеспечивается точность измерения глубины. Ось объектива видеоскопа не обязательно должна располагаться перпендикулярно поверхности измеряемого дефекта.  Измерительные режимы при контроле трубопровода:
Измерительные режимы при контроле трубопровода:
Серия сообщений "Видео и ТВ-техника":Антенны, телевизоры, оборудованиеЧасть 1 - Экспозиция высокоточных приводов
Часть 2 - Миллион условненьких единичек в день
...
Часть 9 - Возможна ли идеальная камера?
Часть 10 - Насадки для камер
Часть 11 - Электронный контрастор
Часть 12 - Изображения объектов в терагерцовом диапазоне
Часть 13 - Телевизионная система для контрастирования защитно окрашенных объектов
...
Часть 48 - Измеритель светового коэффициента пропускания автомобильных стекол
Часть 49 - АВТОМОБИЛЬ ДОСТАВИТ ГРУЗ ПО ВОДЕ И ПОСУХУ
Часть 50 - Умный дом: управление системой освещения
Серия сообщений "Электроника":Электронные и радиотехнические устройства, практические схемыЧасть 1 - Помехи ИК-приборам дистанционного управления AV-аппаратурой
Часть 2 - Если посмотреть на работающий ускоритель частиц
...
Часть 7 - ФОТОПРИЕМНИК ДЛЯ РЕГИСТРАЦИИ БЫСТРОПРОТЕКАЮЩИХ ПРОЦЕССОВ
Часть 8 - Определение рациональных коэффициентов компрессии
Часть 9 - Электронный контрастор
Часть 10 - Изображения объектов в терагерцовом диапазоне
Часть 11 - Определение координат регистрируемых объектов
...
Часть 47 - Сельская/дачная проституция проблематична без "электронных сутенёров"
Часть 48 - Умный дом сам отремонтирует бытовую технику: телевизор, микроволновку, чайник, смартфон
Часть 49 - Электроника и обучение собак
|
Метки: контрастор видеоскопическая система видеоскоп Купольная камера |
Определение рациональных коэффициентов компрессии |
 В данной работе показывается, что, во-первых, область таких рациональных коэффициентов существует и, во-вторых, их значения зависят от частотных свойств оптико-электронного тракта.
В данной работе показывается, что, во-первых, область таких рациональных коэффициентов существует и, во-вторых, их значения зависят от частотных свойств оптико-электронного тракта.
Серия сообщений "Роботизация":Роботы в вашей среде обитанияЧасть 1 - Об эффективности видеотехнологий в робототехнических системах
Часть 2 - Будущее электронного зрения
...
Часть 11 - Оптико-телевизионная система позиционирования (ОТС)
Часть 12 - Управление следящей системой
Часть 13 - Определение рациональных коэффициентов компрессии
Часть 14 - Приборы дальнего наблюдения
Часть 15 - Изображения объектов в терагерцовом диапазоне
...
Часть 48 - Беспилотные фуры: трансконтинентальный транзит
Часть 49 - Помогает ли «социальный рейтинг» Китаю бороться с пандемией?
Часть 50 - Внешность какой киноактрисы предпочтительнее для женщины-робота?
Серия сообщений "Электроника":Электронные и радиотехнические устройства, практические схемыЧасть 1 - Помехи ИК-приборам дистанционного управления AV-аппаратурой
Часть 2 - Если посмотреть на работающий ускоритель частиц
...
Часть 6 - ВИРТУАЛЬНЫЙ ЛАБОРАТОРНЫЙ СТЕНД
Часть 7 - ФОТОПРИЕМНИК ДЛЯ РЕГИСТРАЦИИ БЫСТРОПРОТЕКАЮЩИХ ПРОЦЕССОВ
Часть 8 - Определение рациональных коэффициентов компрессии
Часть 9 - Электронный контрастор
Часть 10 - Изображения объектов в терагерцовом диапазоне
...
Часть 47 - Сельская/дачная проституция проблематична без "электронных сутенёров"
Часть 48 - Умный дом сам отремонтирует бытовую технику: телевизор, микроволновку, чайник, смартфон
Часть 49 - Электроника и обучение собак
|
Метки: микромасштаб имитационные изображения коррелируемость |
Слагаемые машинного зрения |
 Сигналы углов ориентации вертолёта по тангажу и крену поступают на вычислитель от гировертикали вертолёта МГВ-1СУи используются в программе вычисления ошибки висения и индикации на ВКУ текущего положения проекции ЦТ вертолёта. Для обеспечения оперативной коррекции параметров законов управления в процессе испытаний сигналы от вычислителя ВК подаются на пульт ПРПЧ, с выхода которого они поступают на автопилот вертолёта.
Сигналы углов ориентации вертолёта по тангажу и крену поступают на вычислитель от гировертикали вертолёта МГВ-1СУи используются в программе вычисления ошибки висения и индикации на ВКУ текущего положения проекции ЦТ вертолёта. Для обеспечения оперативной коррекции параметров законов управления в процессе испытаний сигналы от вычислителя ВК подаются на пульт ПРПЧ, с выхода которого они поступают на автопилот вертолёта.
Серия сообщений "Машинное обучение":Обучение компьютерных систем. Компьютерное зрение.Часть 1 - Тема электронного слуха на VI Международной конференции «Цифровая обработка сигналов и её применение» (по материалам РНТОРЭС им. А. С. Попова)
Часть 2 - Технологии Intel на Форуме IDF в Москве
...
Часть 10 - Слух роботов
Часть 11 - Всякий умный дом только тогда чего-нибудь стоит, когда он умеет себя защищать
Часть 12 - Слагаемые машинного зрения
Часть 13 - Новые рабочие станции и серверы поддерживают технологии глубинного обучения
Часть 14 - DataStart Conference 2018
...
Часть 47 - Внешность какой киноактрисы предпочтительнее для женщины-робота?
Часть 48 - Тест Тьюринга и робототехника
Часть 49 - О роботизации сбора грибов
|
Метки: алгоритм автосопровождения переобновления эталонов многоспектральные системы ТВ-датчик |
Операторский кран «Каскад» |
 с длиной стрелы да 25 м. Допустимая ветровая нагрузка – до 10 м/с. максимальная нагрузка на стрелу – до 80 кг. Угол поворота стрелы – 360°. Угол наклона стрелы - ± 60°.
с длиной стрелы да 25 м. Допустимая ветровая нагрузка – до 10 м/с. максимальная нагрузка на стрелу – до 80 кг. Угол поворота стрелы – 360°. Угол наклона стрелы - ± 60°.
Метки: ветровая нагрузка Температурный датчик Макрообъектив управление масштабированием |
Насадки для камер |
 Трубчатые объективы Probe позволяют снимать не только в непосредственной близости от объекта, но и внутри его. Для этого существуют множество различных специальных насадок. Помещенный в пластиковый кофр объектив Probe в форме перископа позволяет снимать под водой, не опуская в воду саму камеру. Тот же перископ даёт возможность получать уникальные кадры при съёмке с низких точек съёмки.
Трубчатые объективы Probe позволяют снимать не только в непосредственной близости от объекта, но и внутри его. Для этого существуют множество различных специальных насадок. Помещенный в пластиковый кофр объектив Probe в форме перископа позволяет снимать под водой, не опуская в воду саму камеру. Тот же перископ даёт возможность получать уникальные кадры при съёмке с низких точек съёмки.
Серия сообщений "Видео и ТВ-техника":Антенны, телевизоры, оборудованиеЧасть 1 - Экспозиция высокоточных приводов
Часть 2 - Миллион условненьких единичек в день
...
Часть 8 - МЕХАНИЗМ ЗРЕНИЯ ЧЕЛОВЕКА И ТЕЛЕВИДЕНИЕ
Часть 9 - Возможна ли идеальная камера?
Часть 10 - Насадки для камер
Часть 11 - Электронный контрастор
Часть 12 - Изображения объектов в терагерцовом диапазоне
...
Часть 48 - Измеритель светового коэффициента пропускания автомобильных стекол
Часть 49 - АВТОМОБИЛЬ ДОСТАВИТ ГРУЗ ПО ВОДЕ И ПОСУХУ
Часть 50 - Умный дом: управление системой освещения
|
Метки: различимость мелких деталей перископ снимать под водой |
Возможна ли идеальная камера? |
 В большинстве высокоскоростных камер используется формат сжатия JPEG - его можно свободно использовать, он не требователен к вычислительным мощностям (сопоставим с декодером), но обладает слабой эффективностью компрессии.
В большинстве высокоскоростных камер используется формат сжатия JPEG - его можно свободно использовать, он не требователен к вычислительным мощностям (сопоставим с декодером), но обладает слабой эффективностью компрессии. Высокое разрешение и высокая частота кадров требуют больших вычислительных мощностей. Ранние модели камер Еlрhеl-313, использующие JPEG и потребляющие 3 Вт, для полноценной работы нуждались в компьютере с процессором частотой 2.5 ГГц. Требования модели 333 в 4-5 раз выше - это делает использование исключительно программных решений непрактичным.
Высокое разрешение и высокая частота кадров требуют больших вычислительных мощностей. Ранние модели камер Еlрhеl-313, использующие JPEG и потребляющие 3 Вт, для полноценной работы нуждались в компьютере с процессором частотой 2.5 ГГц. Требования модели 333 в 4-5 раз выше - это делает использование исключительно программных решений непрактичным. Возможно ли вышеназванное «триединство» вообще? На основе камер Еlрhеl-333 сделана попытка доказать такую возможность. Для достижения этой цели были объединены возможности высокоэффективного реконфигурируемого устройства (FРGА) и встроенного компьютера, управляемого операционной системой GNU/Linuх. Также использована высокопродуктивная свободная модель разработки аппаратных средств FРGА и предоставляемых под лицензией GNU/GPL.
Возможно ли вышеназванное «триединство» вообще? На основе камер Еlрhеl-333 сделана попытка доказать такую возможность. Для достижения этой цели были объединены возможности высокоэффективного реконфигурируемого устройства (FРGА) и встроенного компьютера, управляемого операционной системой GNU/Linuх. Также использована высокопродуктивная свободная модель разработки аппаратных средств FРGА и предоставляемых под лицензией GNU/GPL. В чем сходство разработки FРGА и обычного ПО? Иногда FРGА разрабатываются подобно схематике – с диаграммами, где виртуальные компоненты заменяют реальные счётчики, регистры, блоки памяти и так далее. Но чаще всего, особенно в больших проектах, работа напоминает разработку ПО - с файлами исходных кодов, содержащими директивы препроцессора, модули, функции, объявления переменных и операторы.
В чем сходство разработки FРGА и обычного ПО? Иногда FРGА разрабатываются подобно схематике – с диаграммами, где виртуальные компоненты заменяют реальные счётчики, регистры, блоки памяти и так далее. Но чаще всего, особенно в больших проектах, работа напоминает разработку ПО - с файлами исходных кодов, содержащими директивы препроцессора, модули, функции, объявления переменных и операторы. В дополнение к вычислительным ресурсам FРGА, камера модели 333 использует отдельную микросхему памяти DDR SDRAM ёмкостью 32 МБ - встроенная память самого чипа ограничена 54 КБ (даже в Sраrtаn-3 с миллионом вентилей).
В дополнение к вычислительным ресурсам FРGА, камера модели 333 использует отдельную микросхему памяти DDR SDRAM ёмкостью 32 МБ - встроенная память самого чипа ограничена 54 КБ (даже в Sраrtаn-3 с миллионом вентилей).
Серия сообщений "Видео и ТВ-техника":Антенны, телевизоры, оборудованиеЧасть 1 - Экспозиция высокоточных приводов
Часть 2 - Миллион условненьких единичек в день
...
Часть 7 - Микровизоры μViso
Часть 8 - МЕХАНИЗМ ЗРЕНИЯ ЧЕЛОВЕКА И ТЕЛЕВИДЕНИЕ
Часть 9 - Возможна ли идеальная камера?
Часть 10 - Насадки для камер
Часть 11 - Электронный контрастор
...
Часть 48 - Измеритель светового коэффициента пропускания автомобильных стекол
Часть 49 - АВТОМОБИЛЬ ДОСТАВИТ ГРУЗ ПО ВОДЕ И ПОСУХУ
Часть 50 - Умный дом: управление системой освещения
|
Метки: видеокодер Оgg Тhеоrа триединство макроблок токены |
Стабилизация кадра |
 То есть, приходится решать задачу тряски, вибрации и даже ударов. Конечно, саму съёмочную технику от разрушения при ударах можно уберечь и профессиональные кинематографисты разработали соответствующие корпусы. Но ведь надо сберечь и с таким трудом снятое изображение. Для этого существуют системы стабилизации и мы приведём практические примеры.
То есть, приходится решать задачу тряски, вибрации и даже ударов. Конечно, саму съёмочную технику от разрушения при ударах можно уберечь и профессиональные кинематографисты разработали соответствующие корпусы. Но ведь надо сберечь и с таким трудом снятое изображение. Для этого существуют системы стабилизации и мы приведём практические примеры. Усовершенствованная система оптической стабилизации изображения сверхширокого диапазона колебаний модели XL1 повторно анализирует изображение, полученное ССD-матрицами, стараясь обнаружить низкочастотные колебания, пропущенные гиросенсором. Эта информация затем посылается обратно к призме, которая уточняет процесс корректировки, еще больше снижая эффект дрожания видеокамеры. Характеристики ССD-детектирования значительно улучшаются в случае низкочастотных колебаний, результатом чего является самая совершенная на сегодняшний день система оптической стабилизации изображения.
Усовершенствованная система оптической стабилизации изображения сверхширокого диапазона колебаний модели XL1 повторно анализирует изображение, полученное ССD-матрицами, стараясь обнаружить низкочастотные колебания, пропущенные гиросенсором. Эта информация затем посылается обратно к призме, которая уточняет процесс корректировки, еще больше снижая эффект дрожания видеокамеры. Характеристики ССD-детектирования значительно улучшаются в случае низкочастотных колебаний, результатом чего является самая совершенная на сегодняшний день система оптической стабилизации изображения.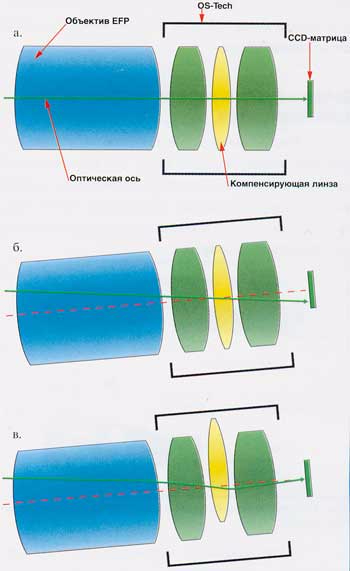 Технология стабилизации изображения OS-Tech позволяет избежать проблем, связанных с вибрацией, вызываемой ветром, подвижной платформой, с которой ведётся съёмка или дыханием оператора. Технология включает в себя систему стабилизации, которая компенсирует смещение оптического изображения благодаря датчикам, фиксирующим смещение оптических лучей. Тем самым обеспечивается четкое и устойчивое изображение во время съёмки.
Технология стабилизации изображения OS-Tech позволяет избежать проблем, связанных с вибрацией, вызываемой ветром, подвижной платформой, с которой ведётся съёмка или дыханием оператора. Технология включает в себя систему стабилизации, которая компенсирует смещение оптического изображения благодаря датчикам, фиксирующим смещение оптических лучей. Тем самым обеспечивается четкое и устойчивое изображение во время съёмки. Оптический линейный стабилизатор для проведения съёмок на больших скоростях, а также в условиях, неблагоприятных по вибрации носителя. Максимальная скорость движения – 120 км/ч.
Оптический линейный стабилизатор для проведения съёмок на больших скоростях, а также в условиях, неблагоприятных по вибрации носителя. Максимальная скорость движения – 120 км/ч. Если готового стабилизатора нет, можно подумать о том, чтобы сделать его по принципу автомобильного амортизатора - как рассказано в журнале "Наука и жизнь". Амортизатор отличается от упругих элементов подвески - пружин. Подвески соединяют раму или кузов машины с мостами или напрямую с колесами. Пружины подвески (витые спиральные или листовые - рессоры, закручивающиеся под нагрузкой упругие стержни - торсионы) смягчают толчки и удары колес о камни, выбоины или другие неровности дороги. В результате сила удара, воспринимаемая кузовом, уменьшается - удар как бы растягивается во времени. Однако всякие пружины, в том числе и упругие элементы подвески, имеют минус: закрепленный на них кузов может раскачиваться, причем не только на неровностях дороги, но и просто на поворотах. Для того чтобы гасить колебания кузова, возникающие при работе подвески, как раз и нужны амортизаторы.
Если готового стабилизатора нет, можно подумать о том, чтобы сделать его по принципу автомобильного амортизатора - как рассказано в журнале "Наука и жизнь". Амортизатор отличается от упругих элементов подвески - пружин. Подвески соединяют раму или кузов машины с мостами или напрямую с колесами. Пружины подвески (витые спиральные или листовые - рессоры, закручивающиеся под нагрузкой упругие стержни - торсионы) смягчают толчки и удары колес о камни, выбоины или другие неровности дороги. В результате сила удара, воспринимаемая кузовом, уменьшается - удар как бы растягивается во времени. Однако всякие пружины, в том числе и упругие элементы подвески, имеют минус: закрепленный на них кузов может раскачиваться, причем не только на неровностях дороги, но и просто на поворотах. Для того чтобы гасить колебания кузова, возникающие при работе подвески, как раз и нужны амортизаторы.
 |
 |
 |
Метки: система стабилизации полёта система оптической стабилизации камеры для дельтаплана масляный амортизатор авиасалон |
ФОТОПРИЕМНИК ДЛЯ РЕГИСТРАЦИИ БЫСТРОПРОТЕКАЮЩИХ ПРОЦЕССОВ |

Серия сообщений "Электроника":Электронные и радиотехнические устройства, практические схемыЧасть 1 - Помехи ИК-приборам дистанционного управления AV-аппаратурой
Часть 2 - Если посмотреть на работающий ускоритель частиц
...
Часть 5 - РАЗРАБОТКА НОВЫХ МЕТОДОВ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ
Часть 6 - ВИРТУАЛЬНЫЙ ЛАБОРАТОРНЫЙ СТЕНД
Часть 7 - ФОТОПРИЕМНИК ДЛЯ РЕГИСТРАЦИИ БЫСТРОПРОТЕКАЮЩИХ ПРОЦЕССОВ
Часть 8 - Определение рациональных коэффициентов компрессии
Часть 9 - Электронный контрастор
...
Часть 47 - Сельская/дачная проституция проблематична без "электронных сутенёров"
Часть 48 - Умный дом сам отремонтирует бытовую технику: телевизор, микроволновку, чайник, смартфон
Часть 49 - Электроника и обучение собак
|
Метки: исследования быстропротекающих процессов исследование спектров излучения |
Камера для высокоскоростной съёмки |

Метки: Камера для высокоскоростной съёмки слабоконтрастные изображения суперглаз трёхмерный шаблон шаблон человеческого тела |
Профессиональная видеосъёмка с вертолёта |
 Компания Robinson Helicopter выпустила на рынок вертолет R44 Newscopter - специализированный вертолёт для СМИ, оснащение которого позволяет проводить высококачественную видеосъемку с передачей изображения в прямой эфир. Этот вертолет спроектирован специально для нужд телекомпаний и рынка теле- и киноиндустрии в целом.
Компания Robinson Helicopter выпустила на рынок вертолет R44 Newscopter - специализированный вертолёт для СМИ, оснащение которого позволяет проводить высококачественную видеосъемку с передачей изображения в прямой эфир. Этот вертолет спроектирован специально для нужд телекомпаний и рынка теле- и киноиндустрии в целом.
Серия сообщений "Пилотируемые летательные аппараты":АвиатехникаЧасть 1 - Проблемы видеосъёмки с летательных аппаратов
Часть 2 - Базовые и корабельные противолодочные самолеты и вертолеты
Часть 3 - Профессиональная видеосъёмка с вертолёта
Часть 4 - Съёмки с самолётного комплекса высокого разрешения
Часть 5 - Лазерно-тепловизионная система предупреждения столкновений с препятствиями
...
Часть 20 - Важно для самолета, применяемого на полях
Часть 21 - Беспилотная пассажирская «малая авиация»
Часть 22 - Как отвадить птиц от аэродромов и свалок
|
Метки: видеосъёмка с вертолёта вертолет R44 Newscopter микрокамеры |






