Продолжение книги «Кто есть кто в робототехнике» ("Компоненты и решения для создания роботов и робототехнических систем") - ISBN 5-9706-0013-X. Люди и предприятия, упомянутые в справочнике (их перечень продолжает пополняться), так или иначе внесли свой вклад в развитие робототехники.
Специальная тема -
Дистанционное ИК-управление роботом |
 Для дистанционного ИК-управления роботом удобен стандартный телевизионный пульт, цифровые кнопки от 1 до 9 которого, расположенные в виде матрицы 3 x 3, хорошо подходят для выбора направления движения, а кнопки увеличения/уменьшения громкости - для регулирования скорости движения. Оставшиеся незанятыми кнопки (0 и включение питания) можно приспособить для подачи роботу каких-либо команд. Автор использовал телевизионный пульт дистанционного управления, поддерживающий стандарт, который предписывает передачу команд импульсами света инфракрасного диапазона; при этом применяется код Manchester.
Для дистанционного ИК-управления роботом удобен стандартный телевизионный пульт, цифровые кнопки от 1 до 9 которого, расположенные в виде матрицы 3 x 3, хорошо подходят для выбора направления движения, а кнопки увеличения/уменьшения громкости - для регулирования скорости движения. Оставшиеся незанятыми кнопки (0 и включение питания) можно приспособить для подачи роботу каких-либо команд. Автор использовал телевизионный пульт дистанционного управления, поддерживающий стандарт, который предписывает передачу команд импульсами света инфракрасного диапазона; при этом применяется код Manchester.  В манчестерской кодировке информация представляется последовательностью импульсов, длительность каждого из которых может иметь одно из трех возможных значений: Т, 2Т или 4Т, где Т = 0,60 мс - период тактовых импульсов кодера. Информационный пакет состоит из 13 импульсов отрицательной полярности. Это значит, что сигнал высокого уровня представляет собой паузу между импульсами, а сами импульсы кодируются низким уровнем напряжения. Первый импульс низкого уровня, длительностью 4Т, является стартовым; за ним следуют информационные. Логический «0» представляется импульсом низкого уровня длительностью 2Т, а логическая «1» - длительностью Т. Все информационные импульсы отделяются друг от друга синхроимпульсами высокого уровня длительностью Т. Каждый информационный пакет повторяется примерно каждые 50 мс. Передатчик не имеет встроенной функции автоповтора, поэтому он должен обеспечиваться внутри приемника. При разработке дистанционно управляемых автоматических устройств это не является проблемой - ведь повторяющиеся команды удобны для того, чтобы поддерживать выполнение какой-либо функции в течение всего времени, пока нажата соответствующая клавиша. Во многих конструкциях автора двигатель робота, выполнив очередную команду дистанционного управления, остается включенным еще в течение 200 мс, ожидая следующего пакета. Такой защитный интервал предотвращает остановку робота в случае, если следующий пакет данных не будет получен вовремя или связь между передатчиком и приемником на короткое время нарушится. Применительно к приёмнику сигналов дистанционного управления очевидна формулировка, описывающая работу декодера: декодер должен принимать сигналы пульта дистанционного управления и передавать биологическому коду соответствующие команды.
В манчестерской кодировке информация представляется последовательностью импульсов, длительность каждого из которых может иметь одно из трех возможных значений: Т, 2Т или 4Т, где Т = 0,60 мс - период тактовых импульсов кодера. Информационный пакет состоит из 13 импульсов отрицательной полярности. Это значит, что сигнал высокого уровня представляет собой паузу между импульсами, а сами импульсы кодируются низким уровнем напряжения. Первый импульс низкого уровня, длительностью 4Т, является стартовым; за ним следуют информационные. Логический «0» представляется импульсом низкого уровня длительностью 2Т, а логическая «1» - длительностью Т. Все информационные импульсы отделяются друг от друга синхроимпульсами высокого уровня длительностью Т. Каждый информационный пакет повторяется примерно каждые 50 мс. Передатчик не имеет встроенной функции автоповтора, поэтому он должен обеспечиваться внутри приемника. При разработке дистанционно управляемых автоматических устройств это не является проблемой - ведь повторяющиеся команды удобны для того, чтобы поддерживать выполнение какой-либо функции в течение всего времени, пока нажата соответствующая клавиша. Во многих конструкциях автора двигатель робота, выполнив очередную команду дистанционного управления, остается включенным еще в течение 200 мс, ожидая следующего пакета. Такой защитный интервал предотвращает остановку робота в случае, если следующий пакет данных не будет получен вовремя или связь между передатчиком и приемником на короткое время нарушится. Применительно к приёмнику сигналов дистанционного управления очевидна формулировка, описывающая работу декодера: декодер должен принимать сигналы пульта дистанционного управления и передавать биологическому коду соответствующие команды. Здесь необходимо сделать два замечания. Во-первых, желательно выполнять отбраковку ошибочно принятых данных. Если длительность какого-либо импульса слишком отличается от трех разрешенных значений, то разумно будет проигнорировать весь 12-битный пакет. Во-вторых, для простоты можно не принимать в расчет стартовый бит в начале каждого пакета. Для реализации описываемого проекта выбран вывод 6 микроконтроллера РIС16F84/РIС16F627 (RВО/INТ), который может быть использован для формирования запроса на прерывание при каждом изменении уровня входного сигнала. Необходимо, чтобы обработчик прерывания вызывался каждый раз, когда уровень принятого инфракрасным детектором сигнала изменяется с низкого на высокий. Тогда, измеряя время, прошедшее с момента последнего вызова, можно оценить ширину импульса и таким образом отличить «0» от «1». Для отсчета времени можно использовать таймер ТМR0, сохраняя его текущее значение в специально отведенной для этого переменной. Программа может учитывать длительность стартового импульса, но мы упростим код, если вовсе будем его игнорировать: ведь для определения длительности очередного импульса он совершенно не нужен. При каждом вызове обработчика прерываний, осуществляемом по приходе положительного фронта очередного импульса, мы будем проверять, как давно был выполнен предыдущий вызов. Если прошло более 9 мс, то надо прекратить процесс декодирования до прихода следующего пакета. Как уже говорилось, пакеты повторяются каждые 50 мс. Поэтому, пропустив текущий пакет, мы всегда имеем шанс без ошибок принять следующий.
Здесь необходимо сделать два замечания. Во-первых, желательно выполнять отбраковку ошибочно принятых данных. Если длительность какого-либо импульса слишком отличается от трех разрешенных значений, то разумно будет проигнорировать весь 12-битный пакет. Во-вторых, для простоты можно не принимать в расчет стартовый бит в начале каждого пакета. Для реализации описываемого проекта выбран вывод 6 микроконтроллера РIС16F84/РIС16F627 (RВО/INТ), который может быть использован для формирования запроса на прерывание при каждом изменении уровня входного сигнала. Необходимо, чтобы обработчик прерывания вызывался каждый раз, когда уровень принятого инфракрасным детектором сигнала изменяется с низкого на высокий. Тогда, измеряя время, прошедшее с момента последнего вызова, можно оценить ширину импульса и таким образом отличить «0» от «1». Для отсчета времени можно использовать таймер ТМR0, сохраняя его текущее значение в специально отведенной для этого переменной. Программа может учитывать длительность стартового импульса, но мы упростим код, если вовсе будем его игнорировать: ведь для определения длительности очередного импульса он совершенно не нужен. При каждом вызове обработчика прерываний, осуществляемом по приходе положительного фронта очередного импульса, мы будем проверять, как давно был выполнен предыдущий вызов. Если прошло более 9 мс, то надо прекратить процесс декодирования до прихода следующего пакета. Как уже говорилось, пакеты повторяются каждые 50 мс. Поэтому, пропустив текущий пакет, мы всегда имеем шанс без ошибок принять следующий.|
Метки: ИК-управление телевизионный пульт код Manchester микроконтроллер РIС16F84/РIС16F627 |
Дистанционное управление по радио |
 В качестве типовой системы дистанционного управления выбрана Quattro работающая в диапазоне 72 МГц. Она состоит из передатчика NET-E104 и приемника NER-700. Дальность действия системы - 1 миля (до 2 км). Подробно о настройке системы рассказано в книге «Insectronics. Build Your Own Walking Robot», задача же справочника "Кто есть кто в робототехнике" в ином – проинформировать о необходимых компонентах. Все функции робота реализованы с помощью микроконтроллера на основе микрочипа PIC16F84. В то же время, необходимо отметить, что для сложного дистанционного радиоуправления разрабатывалась и отечественная аппаратура. В первом выпуске справочника подробно рассказывалось о том, как собрать и настроить двухкомандную аппаратуру радиоуправления на транзисторах. Но две команды – это мало, особенно в сравнении с вышеописанной системой зарубежного производства. Между тем, в своё время заслуженный тренер СССР Михаил Васильченко разработал пятикомандную аппаратуру радиоуправления «Икар-5» для авиамоделей. С ее помощью можно выполнить почти весь комплекс фигур высшего пилотажа; аппаратура пригодна также для судо- и автомоделей. Во многом приёмник и передатчик напоминают те, о которых расказывалось в первом выпуске справочника, поэтому мы подробнее рассмотрим лишь узлы, отвечающие за «многокомандность». Описание приводится по тексту журнала «Моделист-конструктор»,
В качестве типовой системы дистанционного управления выбрана Quattro работающая в диапазоне 72 МГц. Она состоит из передатчика NET-E104 и приемника NER-700. Дальность действия системы - 1 миля (до 2 км). Подробно о настройке системы рассказано в книге «Insectronics. Build Your Own Walking Robot», задача же справочника "Кто есть кто в робототехнике" в ином – проинформировать о необходимых компонентах. Все функции робота реализованы с помощью микроконтроллера на основе микрочипа PIC16F84. В то же время, необходимо отметить, что для сложного дистанционного радиоуправления разрабатывалась и отечественная аппаратура. В первом выпуске справочника подробно рассказывалось о том, как собрать и настроить двухкомандную аппаратуру радиоуправления на транзисторах. Но две команды – это мало, особенно в сравнении с вышеописанной системой зарубежного производства. Между тем, в своё время заслуженный тренер СССР Михаил Васильченко разработал пятикомандную аппаратуру радиоуправления «Икар-5» для авиамоделей. С ее помощью можно выполнить почти весь комплекс фигур высшего пилотажа; аппаратура пригодна также для судо- и автомоделей. Во многом приёмник и передатчик напоминают те, о которых расказывалось в первом выпуске справочника, поэтому мы подробнее рассмотрим лишь узлы, отвечающие за «многокомандность». Описание приводится по тексту журнала «Моделист-конструктор»,

Серия сообщений "Моделизм":Создание моделей и копий техникиЧасть 1 - Робот-разведчик
Часть 2 - Самоделки на колёсах и гусеницах
...
Часть 29 - Условия возникновения автоколебаний
Часть 30 - Системы дистанционного управления
Часть 31 - Дистанционное управление по радио
Часть 32 - Управление путём визуального распознавания объекта
Часть 33 - Принцип пропорционального радиоуправления
...
Часть 42 - Кибернетический планетоход
Часть 43 - Изготовление траков гусеничной ленты для моделей гусеничных машин
Часть 44 - Открытие крытого трека для гонок на радиоуправляемых моделях
|
Метки: микрочип PIC16F84 многокомандность модулятор осциллограф |
Системы дистанционного управления |

Серия сообщений "Моделизм":Создание моделей и копий техникиЧасть 1 - Робот-разведчик
Часть 2 - Самоделки на колёсах и гусеницах
...
Часть 28 - Роботы-чудовища
Часть 29 - Условия возникновения автоколебаний
Часть 30 - Системы дистанционного управления
Часть 31 - Дистанционное управление по радио
Часть 32 - Управление путём визуального распознавания объекта
...
Часть 42 - Кибернетический планетоход
Часть 43 - Изготовление траков гусеничной ленты для моделей гусеничных машин
Часть 44 - Открытие крытого трека для гонок на радиоуправляемых моделях
|
Метки: телеметрические термоизвещатели вспомогательный электродвигатель поиск восходящих потоков |
Серия камер MotionScope для высокоскоростного формирования изображений |
 На рис. 1.44 - снимок летящей пули, сделанный с помощью MotionScope.
На рис. 1.44 - снимок летящей пули, сделанный с помощью MotionScope.
Метки: сверхскоростная видеосъёмка ысокоскоростной камеры фрейм снимок летящей пули |
МЕТОДИКА КАЛИБРОВКИ ИЗОБРАЖЕНИЙ МИКРООБЪЕКТОВ |

Серия сообщений "Оптика":объективы, приборы, физикаЧасть 1 - Как прогнозировать условия видимости?
Часть 2 - Проблемы видеосъёмки с летательных аппаратов
Часть 3 - Для управления фокусом и зумом
Часть 4 - Ряд принципов, лежащих в основе систем «обогащения» цвета
Часть 5 - МЕТОДИКА КАЛИБРОВКИ ИЗОБРАЖЕНИЙ МИКРООБЪЕКТОВ
Часть 6 - Международная выставка «Оптика»
Часть 7 - МАКРООБЪЕКТИВЫ
...
Часть 30 - Переделка видеокамер гаджетов в стационарные камеры видеонаблюдения
Часть 31 - ЛЕТАЮ, ВИЖУ, СНИМАЮ: винтокрылые шпионы
Часть 32 - Стереокино для взрослых
|
Метки: средства LabVIEW вход фотоприемника IMAQ Vision |
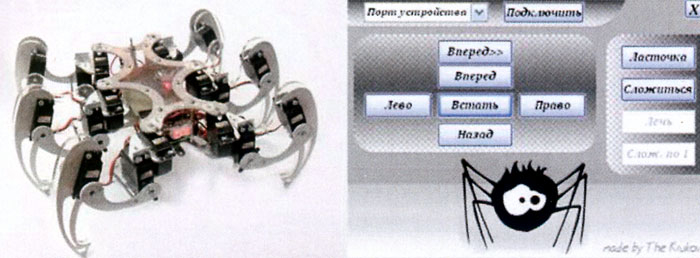
ШАГАЮЩАЯ МАШИНА ТИПА HEXAPOD |
Серия сообщений "Движители":ходовая часть,моторыЧасть 1 - Самоделки на колёсах и гусеницах
Часть 2 - Движители плавающих объектов.
...
Часть 7 - ВОЛНА ВМЕСТО КОЛЕСА
Часть 8 - ИЗГОТОВЛЕНИЕ ГУСЕНИЦЫ ДЛЯ МОТОНАРТ
Часть 9 - ШАГАЮЩАЯ МАШИНА ТИПА HEXAPOD
Часть 10 - Шариковая винтовая передача (ШВП)
Часть 11 - Линейные серводвигатели
...
Часть 26 - Сверхтяжелая робототехника – предмет первой необходимости
Часть 27 - Самодельные ветроэлектрогенераторы: какая нужна сила ветра?
Часть 28 - ЛЕТАЮ, ВИЖУ, СНИМАЮ: винтокрылые шпионы
Серия сообщений "Внедорожники и вездеходы":SUVs and ATVsЧасть 1 - За хакерскую атаку на беспилотный транспорт - 101 год тюрьмы?
Часть 2 - ШАГАЮЩАЯ МАШИНА ТИПА HEXAPOD
Часть 3 - Шнекоход «Буран»
Часть 4 - Мотонарты «Лайка-2»
...
Часть 27 - Засыпьте в бензобак водород
Часть 28 - Машины на основе высокотемпературных сверхпроводников
Часть 29 - Парковочное место и его юридический статус
|
Метки: Solid Works программирования движения робота электроагрегат ШАГАЮЩАЯ МАШИНА ТИПА HEXAPOD |
Патроны для пистолетов класса "Нелетальное Оружие" |
 Характеристики: 18 х 45 (18,5 х 60).
Характеристики: 18 х 45 (18,5 х 60).
Серия сообщений "Защита и самооборона":технические средстваЧасть 1 - Как защитить колёса автомобиля от саморезов?
Часть 2 - Звуковые эффекты на страже дачного участка
Часть 3 - Утопленника можно вернуть к жизни
Часть 4 - ГЕНЕРАТОР, ИМИТИРУЮЩИЙ ЗВУК ВЫСТРЕЛА
Часть 5 - Патроны для пистолетов класса "Нелетальное Оружие"
Часть 6 - УСТРОЙСТВО С АВТОНОМНЫМ ПИТАНИЕМ ДЛЯ БОРЬБЫ С НАСЕКОМЫМИ
Часть 7 - ПЕРЕДАТЧИК ОХРАННОЙ СИСТЕМЫ АВТОМОБИЛЯ
...
Часть 37 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 13-я
Часть 38 - Безопасность и неприкосновенность парковки автомобиля возле дома или офиса
Часть 39 - Кино и опасные бродячие бешеные собаки
|
Метки: Травматический патрон Светозвуковой патрон. |
Вибрационный детектор для защиты гибких ограждений |

Серия сообщений "Загородный дом":Строительно-монтажные работы, обустройствоЧасть 1 - Надстраиваем "рабицу" - и другие рекомендации дачникам
Часть 2 - Звукоизолирующие конструкции
...
Часть 5 - Принцип работы пассивных ИК извещателей
Часть 6 - Системы охранно-пожарной сигнализации
Часть 7 - Вибрационный детектор для защиты гибких ограждений
Часть 8 - ИК-детекторы движения
Часть 9 - Герметизирующая лента
...
Часть 48 - Может, насекомые в доме – это признак хорошей экологии?
Часть 49 - Зачем квадрокоптер в дачном хозяйстве
Часть 50 - Грязь влияет на характеристики телекамер и солнечных элементов
Серия сообщений "Безопасность":Охранные системы.Часть 1 - Как распознать потенциального киллера?
Часть 2 - Лоббисты поставщиков кухонных газовых плит полностью разоблачили себя
...
Часть 14 - Принцип работы пассивных ИК извещателей
Часть 15 - Системы охранно-пожарной сигнализации
Часть 16 - Вибрационный детектор для защиты гибких ограждений
Часть 17 - Система телеметрического управления в общей концепции систем охраны
Часть 18 - Извещатель разбития стекла
...
Часть 48 - Робот-газовщик для инспекции газового оборудования в квартирах
Часть 49 - Багажник вашего автомобиля расскажет криминалистам всю правду
Часть 50 - Техническое решение проблемы заснувших за рулём водителей
|
Метки: удаленный контроль системы пьезоэлектрические технологии импульсная рефлектометрия |
Системы охранно-пожарной сигнализации |

Серия сообщений "Загородный дом":Строительно-монтажные работы, обустройствоЧасть 1 - Надстраиваем "рабицу" - и другие рекомендации дачникам
Часть 2 - Звукоизолирующие конструкции
...
Часть 4 - Периметрическая детекторная система (ПДС)
Часть 5 - Принцип работы пассивных ИК извещателей
Часть 6 - Системы охранно-пожарной сигнализации
Часть 7 - Вибрационный детектор для защиты гибких ограждений
Часть 8 - ИК-детекторы движения
...
Часть 48 - Может, насекомые в доме – это признак хорошей экологии?
Часть 49 - Зачем квадрокоптер в дачном хозяйстве
Часть 50 - Грязь влияет на характеристики телекамер и солнечных элементов
Серия сообщений "Безопасность":Охранные системы.Часть 1 - Как распознать потенциального киллера?
Часть 2 - Лоббисты поставщиков кухонных газовых плит полностью разоблачили себя
...
Часть 13 - Периметрическая детекторная система (ПДС)
Часть 14 - Принцип работы пассивных ИК извещателей
Часть 15 - Системы охранно-пожарной сигнализации
Часть 16 - Вибрационный детектор для защиты гибких ограждений
Часть 17 - Система телеметрического управления в общей концепции систем охраны
...
Часть 48 - Робот-газовщик для инспекции газового оборудования в квартирах
Часть 49 - Багажник вашего автомобиля расскажет криминалистам всю правду
Часть 50 - Техническое решение проблемы заснувших за рулём водителей
|
Метки: системы тревожной сигнализации брелок-передатчик Охранные извещатели. |
Приготовление припоя А |

Метки: обмазывается шамотной глиной расплавленное олово |






