"ИСТОРИЯ ИНЖЕНЕРНЫХ КОНСТРУКТОРОВ FISCHERTECHNIK"
=======================================
текст этой уникальной статьи взят в блоге:
Пакпак
Инженерные конструкторы FISCHERTECHNIK
http://pacpac.ru
http://pacpac.ru/ft-blog/
-
источник:
https://geektimes.ru/company/pacpac/blog/296277/
=
История инженерных конструкторов fischertechnik:
-
1.

-
Иногда в окружающем нас мире происходят странные вещи. Например, на волне безумия массового потребления товаров и цифрового контента, в бесконечном калейдоскопе вещей-однодневок, которые высыпаются с экранов мониторов и тв, незаметно теряются действительно удивительные коммерческие продукты с собственной философией и многолетней историей.
Сегодня я хочу поделиться материалом о проекте, который уже 52 года способствует формированию инженерных кадров в разных странах, включая СССР и РФ. Речь пойдет о конструкторах fischertechnik (Фишертехник).
1965
История конструкторов fischertechnik началась 52 года назад, когда талантливый немецкий предприниматель и изобретатель Артур Фишер (1919-2016) решил использовать оригинальный маркетинговый приём – подарить своим клиентам на рождество что-то нестандартное, отличающееся от привычного набора: шоколад, брендированные ручки и рекламная макулатура.
Надо сказать, что к тому времени его основной бизнес – производство пластикового строительного крепежа – уже крепко стоял на ногах и располагал всем необходимым для быстрого запуска в производство новых деталей из пластика (сама по себе история жизни г-на Фишера весьма увлекательна и требует отдельного поста).
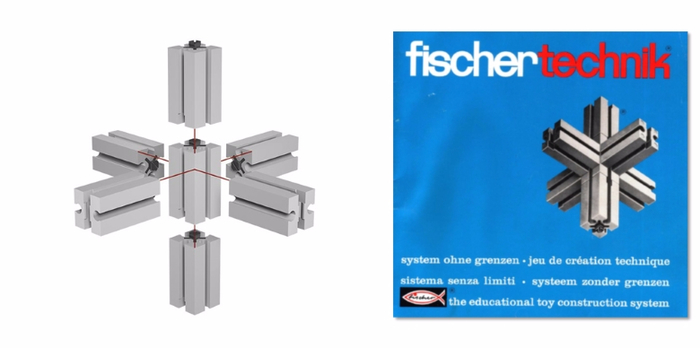
В общем, доподлинно неизвестно, что подтолкнуло его к окончательной идее, но в результате на свет появился оригинальный пластиковый строительный блок, к которому можно было присоединять другие детали со всех сторон.
Детали были выполнены из полиамида и содержали в себе усиливающий конструкцию стальной элемент. Иллюстрация, поясняющая способ присоединения деталей друг к другу:
-
2.
-
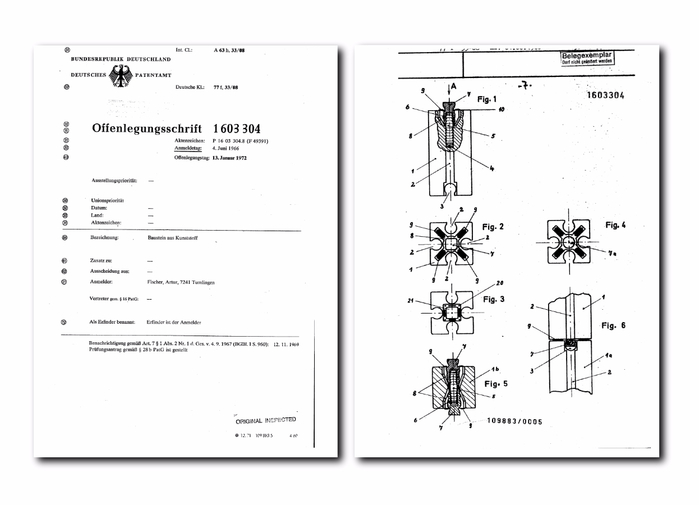
На картинке ниже копия патента P 1603304, в котором описана конструкция этого блока. Заявка, кстати, была подана 4 июня 1966, а изобретение зарегистрировано 13 января 1972. Ссылка на страницу DPMA.
-
https://register.dpma.de/DPMAregister/pat/register?AKZ=16033048&CURSOR=0
-
3.
-
Отклик клиентов был настолько хорошим, что Артур принял решение запустить наборы в коммерческое производство – так на свет появился первый набор для конструирования fischertechnik. Можно сказать, что здесь он нащупал золотую жилу – талант изобретателя и чутье бизнесмена позволили ему выпустить на рынок успешный продукт – конструктор fischertechnik быстро занял место на полках магазинов и был тепло принят образовательным сообществом.
1966
Первые результаты коммерциализации изобретения появились весной 1966 года – в продажу поступили три базовых набора fischertechnik – 100, 200 и 400 и пять наборов с деталями для апгрейда – 10, 15, 20, 25 и 30.
На картинке конструкторский набор FT200:
-
4.

-
Апгрейдить наборы можно было по следующим формулам:
FT200 = FT100 + FT10 + FT15 + FT20
FT400 = FT200 + FT10 + FT15 + FT25 + FT30
На картинке набор для апгрейда FT30:
-
5.

-
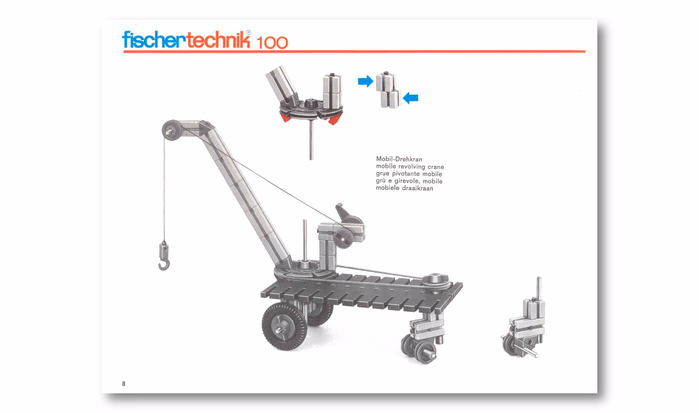
Это были простые наборы для конструирования машин и механизмов с ручным приводом. Однако уже в то время fischertechnik выделялся инженерным уклоном – все конструкции так или иначе были связаны с реальной техникой, в них отсутствовали какие-либо декоративные элементы без функционального смысла. Такую философию конструктор fischertechnik сохраняет и сейчас.
На картинке ниже скан страницы из инструкции к набору FT 100:
-
6.
-
1967
В самом начале 1967 года в продаже появились наборы расширения mot.1 и mot.2 с двигателями постоянного тока, редукторами и элементами зубчатых передач. С помощью этих наборов можно было расширить функциональные возможности уже имеющихся конструкторов и «оживить» собранные конструкции с помощью электропривода.
На картинке набор FT mot.1:
-
14.

-
Также в этом году появилось шесть дополнительных наборов с разными деталями для расширения возможностей конструкторов:
-
15.

-
1968
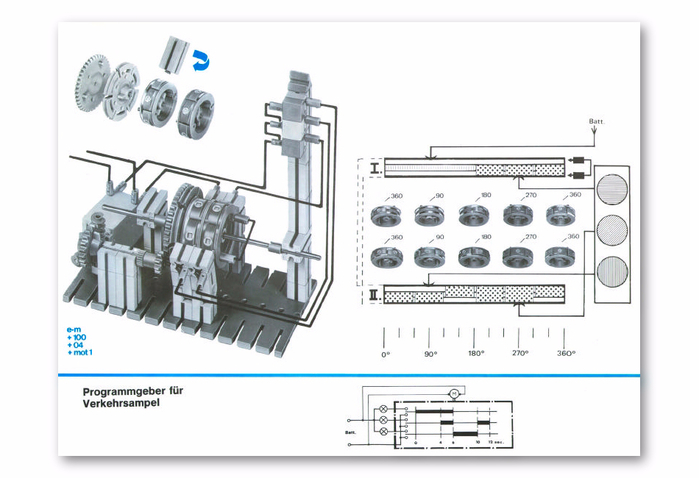
Через год в линейке fischertechnik появился первый электромеханический набор e-m1 – «Elektro-Mechanik», в состав которого входили лампы, кнопки, провода и переключатели. Также в конструкторе было несколько контактных колец для скользящих контактов, из которых можно было собрать простейший командоаппарат для циклического управления собранными моделями.
На картинке ниже страница из инструкции по сборке светофора с автоматическим управлением:
-
16.
-
1969
В 1969 Артур Фишер продолжает развивать электронное направление в своих конструкторах и выпускает набор l-e1 – «Licht-Elektronik»:
-
17.

-
В наборе можно было найти линзы, зеркала, лампы, механические и электронные компоненты для выполнения экспериментов и многостраничный буклет с описанием каждого варианта конструкции.
Что дальше?
Каждый год fischertechnik выпускал новые наборы, постепенно охватывая новые технические области. Появилось разделение на наборы для домашнего использования и образовательные. Думаю, что детальное перечисление наборов будет утомительным. Поэтому вместо подробного хронологического альманаха я отмечу ключевые, на мой взгляд, даты в истории конструктора.
1981
В этом году в продажу поступил пневматический конструктор «Pneumatik», выполненный в виде набора дополнительных деталей с пневматическими цилиндрами, распределителями, шлангами и штуцерами. Для нагнетания сжатого воздуха предлагалось использовать ручной насос или электрический компрессор. Позже появился набор для апгрейда, в котором были детали для сборки фирменного поршневого компрессора с электродвигателем, цилиндром и ресивером. Этот набор пережил несколько ревизий и сейчас выпускается в виде конструктора 516185 «Пневматика 3».
-
18.

-
1982
Через год после пневматики в продаже появляется несколько наборов с гидравлическим приводом. В этих наборах в качестве насоса использовался один из входящих в комплект цилиндров. Есть легенда, что эти наборы не получили дальнейшего развития по причине массового недовольства родителей, которые столкнулись с залитыми водой полами – видимо, они никогда не бывали на производстве, где есть гидравлика.
-
19.

-
1985
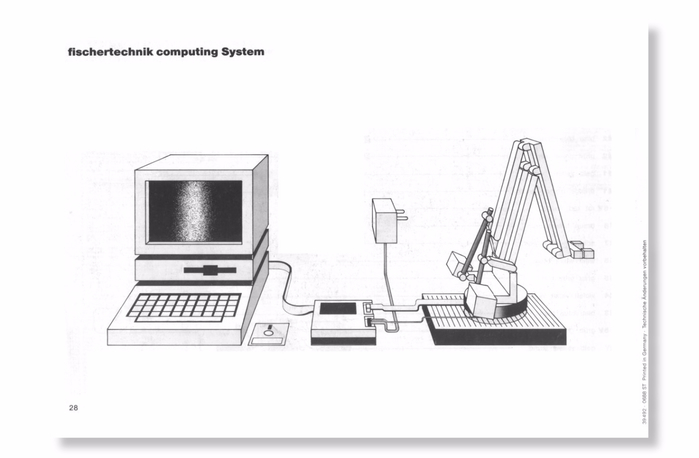
Ключевой момент в истории fischertechnik – в продажу поступил первый конструктор с возможностью компьютерного управления – fischertechnik Computing. Дополнительно к этому набору требовалось приобрести электронный блок Interface для связи с компьютером. Всего было выпущено 7 блоков для подключения к популярным компьютерам того времени, среди которых: Apple, Sinclair, Acorn, Commodore. Причем IBM PC в этом списке не было. Модуль для подключения к IBM появился только в 1986 г.
-
20.

-
Схема подключения датчиков и исполнительных устройств к компьютеру через интерфейсный блок:
-
21.
-
С помощью этого набора можно было познакомиться с технологиями компьютерного управления различными машинами и технологическими процессами и даже построить маленький сварочный манипулятор. Для программирования предлагалось использовать языки программирования BASIC и PASCAL. В комплекте шел буклет с подробным разбором каждой задачи и примерами исходного кода.
-
1.
-
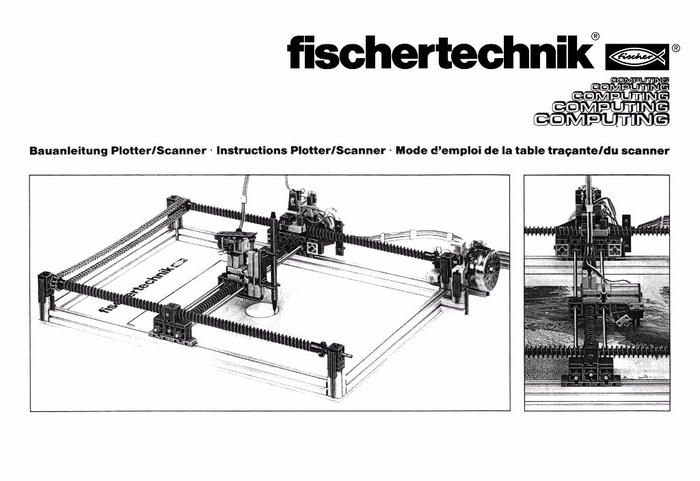
Немного позже в этом году вышли еще два набора, посвященные автоматике и робототехнике – «Trainingsroboter» и «Plotter-scanner».
Конструктор «Trainingsroboter» для сборки действующей модели манипуляционного робота с функцией обучения движениям:
-
2.

-
Конструктор «Plotter-scanner» – из него можно было построить плоттер и сканер с компьютерным управлением.
-
3.
-
1987
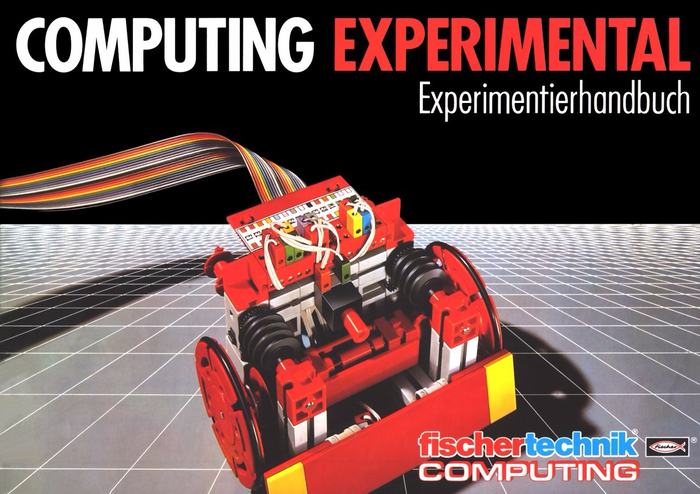
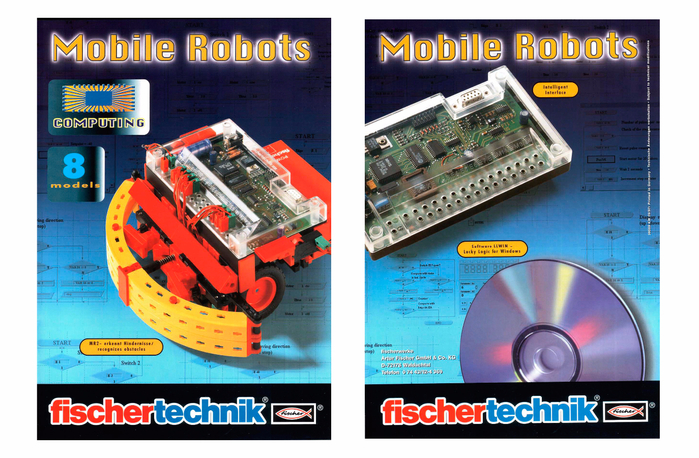
Следующий набор в серии Computing, как вы наверное уже догадались, был посвящен мобильной робототехнике. В 1987 г. вышел набор fischertechnik «Computing-Experimental».
-
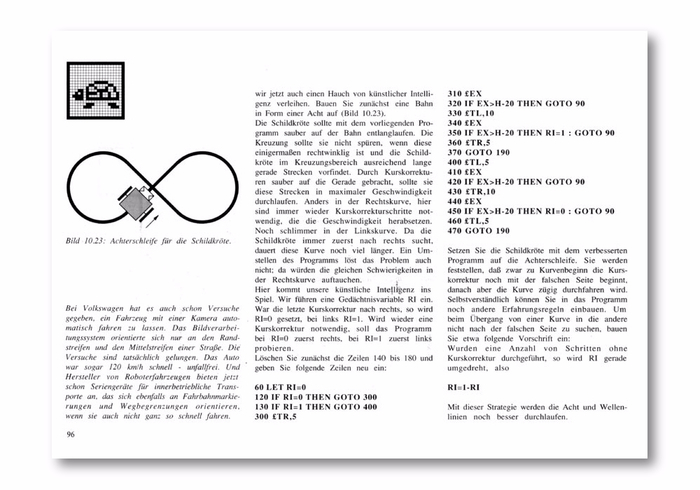
Тележка, построенная из этого конструктора, подключалась к компьютеру через интерфейсный блок и могла двигаться, выполняя команды в соответствии с программой, составленной на языках BASIC или PASCAL. Конечно, постоянное наличие кабеля для связи с компьютером сильно ограничивало пространство для экспериментов, но уже тогда в дидактическом буклете была целая глава, посвященная хиту современной образовательной робототехники – следованию по линии (line following):
-
4.
-
1991
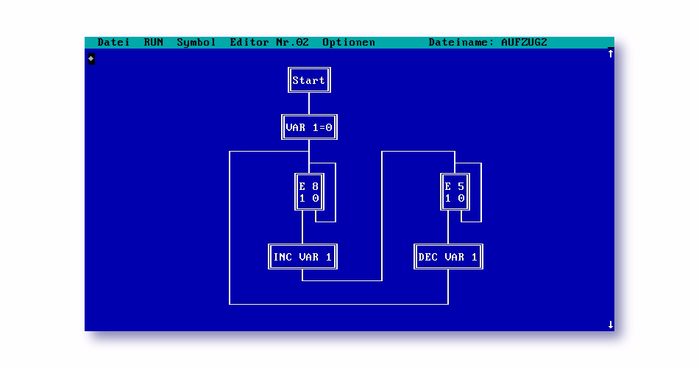
Темп развития компьютерных технологий продолжал увеличиваться, и как следствие в 1991 г. в инструментарии fischertechnik появилось новое ПО LuckyLogic – учебный пакет для разработки управляющих программ на визуальном языке в виде блок схем. До выхода на рынок графических пользовательских интерфейсов было еще далеко, поэтому в ПО LuckyLogic использовалась псевдографика. Если вы застали времена NC или VC, то следующая картинка будет вам знакома:
-
5.
-
1997
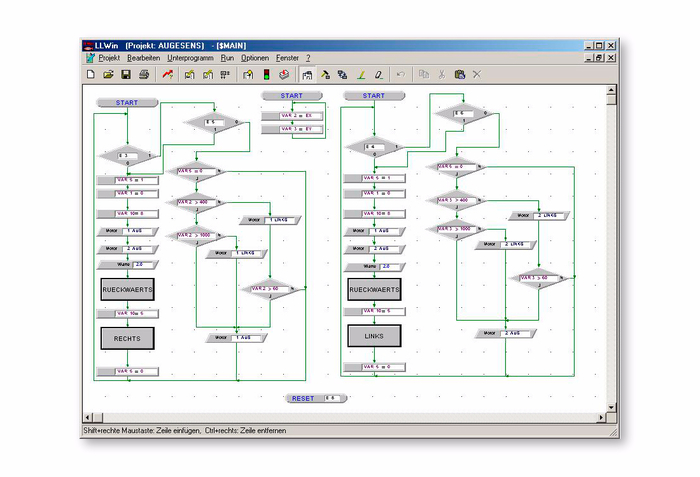
Следующее поколение инструментального ПО выходит в 1997 г. под названием LLWin для ОС Windows 3.11 и 95. В LLWin управляющие программы, также как и в Lucky Logic, составляются в виде блок-схем. Кроме того, имеется возможность строить многопоточные пользовательские алгоритмы, поддерживаются подпрограммы, локальные и глобальные переменные, а также имеются элементы визуализации и пользовательского интерфейса – кнопки и индикаторы:
-
6.
-
Одновременно с ПО LLWin компания fischertechnik выпускает новый блок управления Intelligent Interface – полноценный программируемый контроллер с процессором и ОЗУ, что позволяет строить автономные модели, которые могут работать самостоятельно без постоянной связи с компьютером:
-
7.
-
Для загрузки управляющих программ в контроллер требовалось подключение к компьютеру через интерфейс RS232.
1999
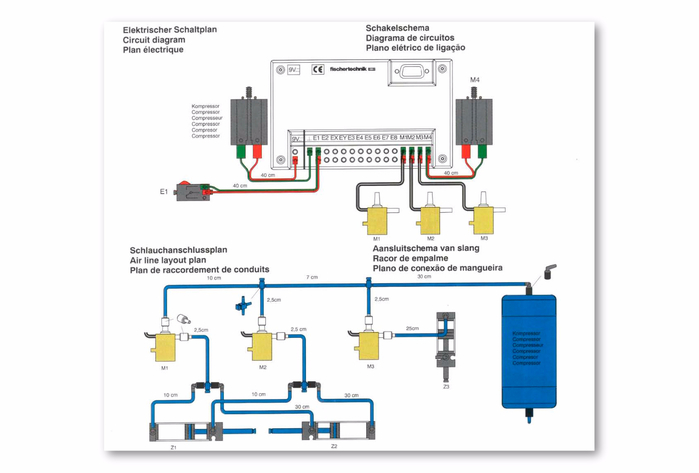
После мобильных роботов в 1999 г. fischertechnik выпускает набор «Pneumatik Robots», посвященный пневматическому приводу в промышленной автоматике. Из конструктора можно было собрать 8 моделей различных производственных машин с пневматическим приводом. Ключевым элементом этого набора были электромагнитные пневмоклапаны, которые подключались к выходам контроллера и использовались для управления подачей сжатого воздуха в пневмоцилиндры.
На картинке ниже электрическая и пневматическая схемы из инструкции по сборке:
-
8.
-
2004
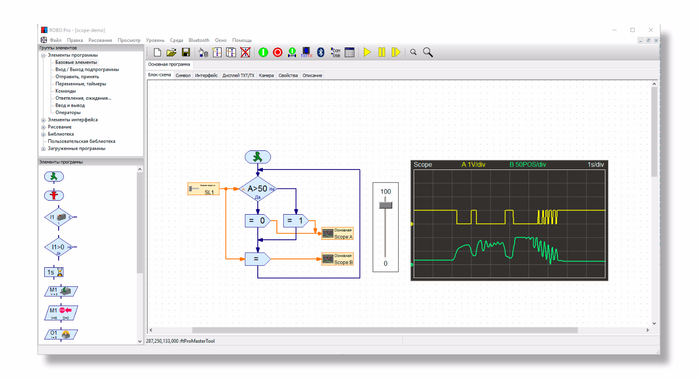
Следующая итерация в серии Computing конструкторов fischertechnik началась в 2004 году с выходом нового контроллера ROBO Interface и новой версии инструментального ПО ROBO Pro.
Одновременно с этим обновились и конструкторские наборы. Вышли новые версии мобильных роботов «Robo Mobile Set», промышленных роботов – «Industry Robots II» и набор для начинающих – «Robo Starter Set».
Новый контроллер ROBO Interface обзавелся flash-памятью, так что теперь программы не пропадали после выключения питания. Для подключения к компьютеру можно было использовать интерфейсы RS232 или USB. Инструментальное ПО ROBO Pro было разработано с нуля и предлагало пользователю расширенный набор функций для разработки и отладки управляющих программ в виде блок-схем:
-
13.
-
2010
На смену ROBO Interface в 2010 г. пришел контроллер ROBO TX, построенный на процессоре ARM9 с встроенными интерфейсами Bluetooth и USB. У контроллера появился дисплей, на который можно было выводить пользовательскую информацию. У контроллера было 4 выхода для подключения моторов, 8 универсальных входов и 4 входа для сигналов от энкодеров. При необходимости можно было увеличить количество входов-выходов, подключив через разъем расширения еще один ROBO TX. Всего в одной сети можно было собрать 8 контролеров и таким образом получить 64 входа и 32 выхода.
Контроллер входил в состав нового конструктора, посвященного мобильной робототехнике, – «ROBO TX Training Lab».
-
14.
-
2014-2017
В настоящее время в конструкторах fischertechnik серии ROBOTICS используется два контроллера – BT Smart и TXT, начального и продвинутого уровней соответственно. Контроллеры поставляются как отдельно, так и в составе готовых наборов 540586 BT Smart Beginner Set и 524328 TXT Discovery set.
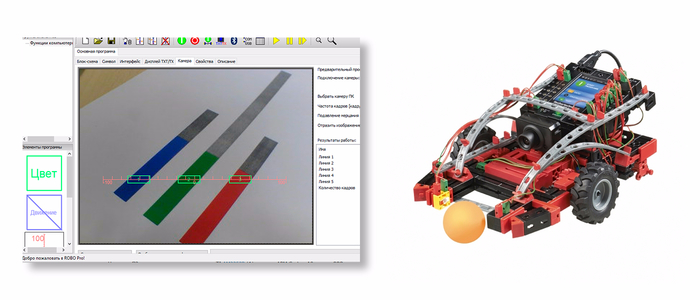
Контроллер ROBOTICS TXT выполнен в виде двухпроцессорной системы на базе процессоров ARM Cortex-A8 и Cortex-M3. Имеет встроенные беспроводные интерфейсы Bluetooth и WiFi, а также стандартный набор коммуникационных шин: I2C, CAN, USB, USB-Host и еще ИК-приёмник. TXT работает под управлением ОС GNU/Linux. При желании можно загрузиться с micro-sd flash-карты.
Главная фишка этого набора – наличие мощной системы компьютерного зрения, которую можно использовать для решения задач автоматического управления различными объектами.
-
15.

-
Для программирования контроллеров используется ПО ROBO Pro Light и ROBO Pro. Причем ROBO Pro Light существует в виде приложения для iOS и Android. Кроме того, можно использовать языки программирования C, С++, Python и любые другие, для которых есть кросс-компилятор или возможность запуска в окружении ОС Linux. Для отдельной группы пользователей есть возможность использовать Scratch.
На картинках ниже мобильный робот из набора «ROBOTICS TXT Discovery Set» с системой компьютерного зрения в реальном времени определяет координаты геометрических объектов в кадре и охотится за мячиком:
-
16.

-
17.
-
Источники информации и картинок
Deutsches Patent- und Markenamt
https://www.dpma.de/ponline/erfindergalerie/bio_fischer.html
Der Herr der Dübel
https://www.heise.de/tr/artikel/Der-Herr-der-Duebel-280873.html
"Dübelkönig" hält mehr als 1100 Patente
https://www.n-tv.de/wirtschaft/Duebelkoenig-haelt-...0-Patente-article14227001.html
Virtuelles fischertechnik Museum
http://www.cc-c.de/fischertechnik/german/ft_museum/ft_start.htm
ft-FanArchiv
http://www.ft-fanarchiv.de
Programación de Robots en LLWin
http://platea.pntic.mec.es/vgonzale/cyr_0204/ctrl_rob/llwin/
==============================================
Мастер Идей.