Изображенная на рис. 1 боевая подводная лодка на солнечных батареях — всего лишь персонаж фильма «ХХХ», по сюжету которого она способна, по словам главного кинозлодея, проплыть неограниченное расстояние. Но она одновременно и часть реальной жизни: это — конкретный пример единения научно технического творчества с Большим Бизнесом, которым, в данном случае, является западная киноиндустрия. Эта киноиндустрия много и со знанием дела пропагандирует технологические новинки не только из любви к искусству, а еще и потому, что с её помощью, в частности как в данном примере, идёт развитие рынка боевых роботов — одного из самых перспективных видов вооружений. Однако эта технофантазия из фильма поможет и нам — тем, что она подчеркивает взаимосвязь содержания выпусков предлагаемой серии справочников. Второй выпуск продолжает тематику первого, который был посвящен беспроводной связи, мобильным технологиям, электропитанию мобильных роботов, электронному зрению. Например, на рис. 2 — полностью автономная система видеонаблюдения; она беспроводная и имеет две солнечные панели, от которых заряжаются шесть батарей высокой ёмкости.
Ежедневно на Землю поступает количество солнечного света, в 10000 раз превышающее мировые потребности в электроэнергии. Каковы на практике возможности солнечного электроснабжения? Лучшим ответом служит пример, испытанный временем: советский самоходный аппарат «Луноход 1» (тот самый «лунный трактор», о котором, как пел В. Высоцкий, рассказывать полезнее, чем о летающих тарелках и прочей мистике). Его солнечные батареи помогли ему, имея массу 840 кг, пройти расстояние 37 км и проработать около 11 месяцев. Поскольку одной из главных его задач была как раз передача на Землю ТВ картинки, ответственность на солнечные батареи ложилась значительная. На рис. 3 — основные элементы конструкции «Лунохода 1»:
1. приборный отсек;
2. камера вертикального панорамирования и камера горизонтального панорамирования;
3. солнечная батарея;
4. антенны;
5. уголковый отражатель;
6. ТВ камеры системы управления;
7. колёсный блок.
б) управление движением лунохода.
В соответствии с этими задачами телевизионный комплекс «Лунохода 1» функционально состоял из двух систем, различных по принципу действия и основным параметрам. Для научных наблюдений необходимо панорамное ТВ изображение большой четкости с малыми геометрическими и яркостными искажениями. Это могла обеспечить аппаратура, имеющая высокую разрешающую способность при большом угле обзора. Замедленная скорость передачи в данной системе была допустима: система предназначалась для работы во время стоянок лунного робота, когда объекты съёмки неподвижны. ТВ система управления работала в процессе перемещения лунохода и должна была давать оперативную информацию о характере поверхности в направлении движения. То есть иметь большее быстродействие, но меньшие качественные показатели: важно было обеспечить надежную передачу изображения лишь тех препятствий, которые представляли на пути опасность. Для научных целей была выбрана система с камерами на основе оптико-механической панорамной развертки, а для управления движением — электронная система малокадрового телевидения. Метод панорамной съемки позволяет всю видеоинформацию передать одним цельным изображением, что исключает потери на геометрическую и яркостную нестыковку кадров.
Высокое качество панорамных изображений обеспечил оптико-механический принцип передачи, что подразумевает наличие таких энергоёмких элементов, как двигатель, редуктор и другие механизмы. К тому же в процессе движения лунохода по неровной поверхности положение его остронаправленной антенны (а именно такая антенна нужна для передачи телевидения, в том числе малокадрового) меняется. Значит, антенну нужно было механически развязать с корпусом лунохода и обеспечить её постоянную направленность на Землю.
Конструктивно панорамные камеры выполнены в виде цилиндров размером 80 × 205 мм. Всего было четыре такие панорамные камеры. Оси панорамирования двух из этих камер близки к вертикали. Они дают горизонтальные панорамные изображения, охватывающие угол чуть более 180° (остальная часть азимутального угла закрыта корпусом лунохода). Две другие камеры имели горизонтальные оси панорамирования и передавали вертикальные панорамы поверхности Луны сбоку, впереди и сзади лунохода. В поле зрения этих камер попадали передние и задние колеса, линия горизонта и космическое небо, занимающее половину панорамы. Эти камеры передавали также изображения Солнца и Земли. По ним, на основе измерений и учета показаний установленного на луноходе датчика вертикали, решалась навигационная задача определения местоположения лунохода на поверхности Луны (сравните этот метод с GPS навигацией, рассмотренной в предыдущем выпуске справочника).
По панорамным изображениям выбиралось направление движения. А при вождении оперативная видеоинформация о характере поверхности перед аппаратом снималась с двух камер ТВ системы управления, расположенных в передней части корпуса лунохода: одной в центре, другой ближе к правому борту. Их угол обзора в горизонтальной плоскости был порядка 50°.
По аналогии, более современный робот на солнечных батареях сможет выполнять еще больше функций, — например, передать с Марса цветное стереоизображение. Причем для увеличения энерговооруженности конструктивно на борту аппарата могли бы, в принципе, располагаться не только защитные, но и солнечные панели (рис. 4). Кроме того, появляются и более эффективные материалы. Так, в Торонтском университете изобретен высокоэффективный пластик для солнечных батарей. Новый материал, чувствительный к инфракрасному излучению, характеризуется более высоким КПД, чем материалы, применяемые в настоящее время для изготовления панелей. Как утверждают разработчики, он преобразует 30% солнечной энергии в электрическую.
Но вот задача для радиолюбителя: даже если усовершенствованными солнечными модулями покрыть шкуру показанных на рис. 5 роботизированных муляжей существ (во многом являвших собой прототип современных боевых роботов), хватит ли вырабатываемой энергии для их передвижения при условии, что будет добавлено необходимое электронно-механическое оснащение? На рисунке видно, что пока они могут лишь качать головой и хвостом (направление движений помечено синим пунктиром). Поэтому в дальнейшем мы еще будем анализировать проблему энергетических соотношений в роботостроении.
Глава I. Солнечная электроэнергетика
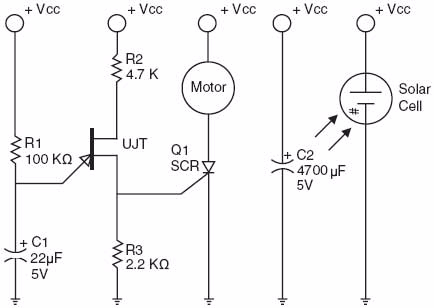
6. Схема солнечной машины для самостоятельной сборки (по книге: John Lovine «Robots, Androids, and Animatrons» — рис. 1.11)
Солнечный элемент (рис. 1.12) заряжает главный конденсатор ёмкостью 4700 мкФ. Когда конденсатор заряжается, уровень напряжения в его цепи увеличивается. Однопереходный транзистор (UJT — unijunction transistor) входит в режим генерации и посылает запускающий импульс кремниевому управляемому диоду (SCR — silicon controlled rectifier). Когда напряжение в цепи главного конденсатора повышается приблизительно до 3 В, запускающий импульс становится достаточным, чтобы включить SCR. Когда SCR открывается, вся запасенная в главном конденсаторе энергия поступает на двигатель «высокой эффективности» (HE — high efficiency). Обороты мотора кратковременны, как и разряд конденсатора, а затем происходит остановка. И далее повторения цикла.
К двигателям «высокой эффективности» можно причислить не все электрические двигатели. Есть простой способ определить, является ли двигатель таковым. «Крутаните» ротор двигателя. Если он прокрутится плавно и продолжит вращение хотя бы на мгновение после того, как вы его отпустите, это, вероятнее всего, высокоэффективный двигатель. Если при прокрутке ротора чувствуется скрежет или встречается сопротивление, то вероятно, что имеет место тип двигателя низкой эффективности. Солнечный элемент, используемый в данной цепи, характеризуется высоким напряжением и высокой эффективностью. Типовые солнечные элементы обеспечивают приблизительно от 0,5 до 0,7 В при различных величинах тока в зависимости от размера элемента. Солнечный элемент, используемый в этой цепи, вырабатывает 2,5 В, но автор книги утверждает, что в его практике этот элемент заряжает конденсатор до 4,3 В в режиме без нагрузки. Автор уверен, что некоторые люди, планирующие собрать эту схему, уже думают о добавлении несколько большего количества солнечных элементов, чтобы ускорить процесс заряжания конденсатора, и не советует делать этого. Добавление солнечных элементов увеличит ток, и это ускорит зарядку только для первого цикла. Для повторения же циклов в цепи ток через SCR должен прекратиться (или по крайней мере быть очень маленьким), чтобы дать закрыться SCR. Если же ток, вырабатываемый солнечными элементами, слишком велик, SCR останется в открытом состоянии. И в этом случае, электрическая энергия от солнечного элемента будет непрерывно идти через SCR и рассеиваться, то есть электрическая энергия не будет накапливаться конденсатором и циклы солнечного двигателя прекратятся. Параметры деталей, используемых в цепи, сбалансированы для оптимальной работы. Компонент, который вы можете изменить — главный конденсатор. Использовать меньшие значения его ёмкости можно для более коротких циклов заряда разряда. Конденсатор (или батарея конденсаторов) большей ёмкости будет накапливать большее количество энергии и исполнять большее количество работы, но учтите, что при использовании конденсаторов большего номинала цикл заряда разряда получится более длительным. Теперь об аналогах. Параметры тиристора 2N 5060, согласно каталогу Distrelec, следующие:
• Uпр, зкр, max (максимально допустимое постоянное прямое напряжение в закрытом состоянии тиристора) = 30 В. Такое же значение имеет и U обр, max (максимально допустимое постоянное обратное напряжение тиристора).
• Iоткр, max (максимально допустимый постоянный ток в открытом состоянии тиристора) = 0,8 А (для RMS: root mean square, среднеквадратичное значение).
• Iоткр, и, max (максимально допустимый импульсный ток в открытом состоянии тиристора) = 10 А (для частоты 60 Гц).
• Iу, от (постоянный отпирающий ток управляющего электрода тиристора) = 200 мкА. Здесь имеется в виду минимальное значение постоянного тока управляющего электрода, которое обеспечивает переключение тиристора из закрытого состояния в открытое при определённых режимах в цепях основных и управляющего электродов.
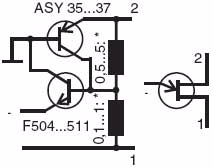
Что касается транзистора 2N2646 Януш Войцеховский в книге «Радиоэлектронные игрушки» (рис. 1.13) рекомендует такой аналог — КТ117. Кроме того, Войцеховский даёт рекомендации о том, как быть, если под рукой не окажется установленного в схеме транзистора или тиристора (либо их аналогов). Такие детали можно заменить более распространёнными, установив, например, вместо одного, довольно редкого планарного однопереходного КТ117, два попроще — по схеме на рис. 1.14. На ней транзистору ASY35 37 соответствуют МП39 42 (в частности, согласно справочнику по аналогам, ASY35 можно заменить на МП42 или МП20А). Транзисторам BF504 511 соответствуют МП111 113 или КТ312 315.
7. Самодельная солнечная батарея (по книге Януша Войцеховского «Радиоэлектронные игрушки»)
Практически все полупроводниковые диоды и транзисторы в стеклянном корпусе могут служить фотоэлектрическими преобразователями. Для этого достаточно удалить их непрозрачную оболочку. Солнечную батарею можно изготовить из неисправных транзисторов при условии, что у них нет короткого замыкания между базой и коллектором или базой и эмиттером. Чем больше мощность транзистора, тем лучший из него получается фотоэлемент. У транзисторов в металлическом корпусе осторожно удаляют корпус или спиливают верхнюю его часть (рис. 1.15). Перед сборкой батареи следует проверить каждый из ее элементов. Для этого между выводами базы и коллектора включают микроамперметр с пределом измерения до 1 мА: «плюс» прибора подключают к коллектору (или эмиттеру), а «минус» — к базе. При освещении элемента солнечным светом микроамперметр должен показать ток 0,2 0,3 мА. Напряжение, измеренное на зажимах элемента, будет около 0,15 В. Для солнечной батареи подбирают элементы с близкими вольтамперными характеристиками. Батарея состоит из двух параллельно соединенных рядов фотопреобразователей, в каждом ряду находится 10-12 соединенных последовательно элементов (принцип — на рис. 1.16).
Солнечная батарея, собранная на транзисторах типа ТG50 (отечественный аналог — МП39 42), дает ток 0,5 мА при напряжении 1,5 В. Применяя транзисторы ТG70 (отечественный аналог — П216), можно получить ток 3 мА при напряжении 1,5 В.
Громкость приемника, который питается от солнечной батареи, зависит не только от интенсивности освещения, но и от размеров антенны и качества заземления. Приемник с солнечной батареей особенно оправдывает себя на пляже, где яркое солнце и влажная почва, обеспечивающая хорошее заземление (рис. 1.17).

8. Мобильные аппараты на солнечных элементах
8.1. Робот газонокосильщик, Швеция. Еще в 2002 году в исследовании, подготовленном Экономической комиссией ООН для Европы и Международной федерацией по робототехнике, базирующейся в Стокгольме, было отмечено, что в спросе на роботы газонокосилки наблюдается настоящий бум. В этом контексте закономерно появление робота Solar Mover (рис. 1.18). Он имеет два колёсных двигателя со встроенной коробкой передач, ножевой диск и три инерционных ножа. Рекомендуемая площадь стрижки — 1200 м2. Рабочую зону определяет проволочное заграждение по периметру газона, получающее слабый ток от солнечной батареи (в правой нижней части рис. 1.17). Косилка стрижет почти постоянно, и это означает, что мелкие обрезки травы быстро разлагаются и удобряют почву и их не надо собирать граблями. При приближении к кромке газона сенсор обнаруживает границу. Косилка разворачивается и стрижет в противоположном направлении. Сенсор обнаруживает также другие препятствия на пути газонокосилки: деревья, камни, садовую мебель и т. д.
8.2. Марсоход «Соджорнер», США. Длина солнечной панели «Соджорнера» (рис. 1.19) составила 63,5 см, мощность — 16 Вт; количество элементов в солнечной батарее — свыше 200. Электродвигатели в ступицах колёс позволяли развивать скорость до 1 см/с.
8.3. Марсоход «Спирит», США (рис.1.20).
8.4. Автоматическая межпланетная станция «Марс», СССР (рис. 1.21). Максимальная стартовая масса — 4650 кг.
8.5. Конфигурация панелей солнечных батарей станции «Салют 6» СССР (рис. 1.22). Таких солнечных панелей на станции было три, каждая из них имела площадь 20 м2 и могла поворачиваться специальным электроприводом по сигналам датчиков положения Солнца: автоматика поворачивала панели таким образом, чтобы они были максимально освещены солнечными лучами. Маневровые двигатели «Салюта» могли ориентировать и автоматически поддерживать ориентацию станции так, чтобы плоскости батарей были направлены на Солнце, а также осуществлять «закрутку» станции по оси, перпендикулярно плоскости солнечных батарей.
8.6. Аэропланы, США: Продолжительность полёта аэропланов на солнечных батареях зависит от того, насколько скорость их полёта позволяет им успевать за перемещением видимого солнца.
8.7. Макет дирижабля с солнечными батареями для питания оборудования, Россия — (рис. 1.25). Площадь покрытия солнечными панелями автором выбрана из расчета мощности, развиваемой солнечными элементами, К = 260 Вт/м2. При этом учитывается, что солнце освещает только верхнюю и боковые части оболочки дирижабля.
8.8. Наноспутник ТНС 1 Россия — (рис.1.26).
В задачу спутника входят:
• разработка технологии передачи данных ДЗЗ (дистанционное зондирование Земли) для широкого круга пользователей в мониторинговом режиме с приемом на малые станции (диаметр антенн 2,6 м);
• проверка работоспособности в космосе коммерческих изделий (микросхем, ТВ камер и др.);
• продолжение отработки систем управления и ориентации спутника.
Параметры спутника:
• орбита синхронно солнечная 650 км;
• ориентация на солнце;
• стабилизация вращением;
• камеры ДЗЗ с разрешением 100 м и захватом 290 км;
• передатчик ДЗЗ 1,7 ГГц, 5 Вт.
Впервые солнечные батареи (наряду с химическими источниками тока) были применены на третьем советском искусственном спутнике Земли в 1958 г. Вес спутника составлял 1327 кг, длина — 3,57 м. Солнечные батареи состояли из пластин монокристаллического кремния с заранее заданной электронной проводимостью. Напряжение отдельных кремниевых элементов составляло 0,5 В, а коэффициент преобразования солнечной энергии — до 11%.
8.9. Наноспутник США (рис. 1.27). Проектировался как один из 64 — для межконтинентального телекоммуникационного сообщения. Гораздо более дешевый в производстве и при запусках, чем сегодняшние многотонные спутники связи. Каждый 15 фунтовый наноспутник содержит приемник, передатчик и микропроцессор. Что действительно делает наноспутники особенными, это их чрезвычайно низкая орбита. В противоположность обычным спутникам, у которых орбита находится в среднем на высоте 13000 миль, наноспутник будет вращаться вокруг земного шара лишь в 600 милях выше поверхности земли. Благодаря такой низкой высоте связь с наноспутниками требует гораздо меньшего количества энергии и намного меньшей антенны, чем необходимо, чтобы связаться с высотными спутниками. Наноспутник имеет встроенную GPS систему, которая информирует о его местоположении.
8.10. Студенческий микроспутник, Россия (рис. 1.28): высота орбиты — 500 км, пространственное разрешение комплекса ДЗЗ (для высоты 600 км) — не хуже 50 м, ширина полосы обзора — 104 км, средневитковое потребление — 22 Вт, скорость линии передачи информации — 27 Мбит/с, габариты — 700 × 700 × 700 мм.
8.11. Ремонтный робот США (рис. 1.29). Плавая в «жидком» пространстве, будущие члены экипажа «Шаттла» тренируются вместе с «Рейнджером», ремонтным роботом, помещенным в соответствующий его размерам бассейн Мэрилендского Университета исследований космических систем. «Рейнджер» на солнечных батареях предназначен для устранения неполадок в работе «Шаттла» в реальном времени под руководством техников на Земле, чтобы уберечь астронавтов «Шаттла» от опасностей при космических прогулках и позволить им сконцентрироваться на задачах интеллектуального свойства.
8.12. Модель лодки на солнечных батареях Россия (рис. 1.30). Автор конструкции (он на фото) приобретал эти солнечные батареи самостоятельно по цене 80 рублей за штуку.
8.13. Модель катера на солнечных батареях Россия. На рис. 1.31,а — автор, на рис. 1.31,b — созданная им конструкция
Последняя работа юных техников Крыма — портативный астрограф для малоформатных камер. Поясним: это прибор, который служит для фотографирования ночного неба. Поскольку небосвод в движении, прибор имеет поворотную систему, позволяющую неотступно следовать за перемещением космического объекта.
Построил астрограф Женя Солоненко из астротехнического кружка (руководитель — В. Г. Григорьев). Женя думает усовершенствовать прибор — вмонтировать в него часовой механизм, тогда астрограф будет держать в прицеле звезду или туманность на протяжении всей съемки, а значит, можно будет делать снимки не только туманности Андромеды или Ориона, как самых ярких на ночном небе, но и буквально еле видимых простым глазом, По материалу журнала "Моделист-конструктор" времён СССР
 6. Схема солнечной машины для самостоятельной сборки (по книге: John Lovine «Robots, Androids, and Animatrons» — рис. 1.11)
6. Схема солнечной машины для самостоятельной сборки (по книге: John Lovine «Robots, Androids, and Animatrons» — рис. 1.11) Что касается транзистора 2N2646 Януш Войцеховский в книге «Радиоэлектронные игрушки» (рис. 1.13) рекомендует такой аналог — КТ117. Кроме того, Войцеховский даёт рекомендации о том, как быть, если под рукой не окажется установленного в схеме транзистора или тиристора (либо их аналогов). Такие детали можно заменить более распространёнными, установив, например, вместо одного, довольно редкого планарного однопереходного КТ117, два попроще — по схеме на рис. 1.14. На ней транзистору ASY35 37 соответствуют МП39 42 (в частности, согласно справочнику по аналогам, ASY35 можно заменить на МП42 или МП20А). Транзисторам BF504 511 соответствуют МП111 113 или КТ312 315.
Что касается транзистора 2N2646 Януш Войцеховский в книге «Радиоэлектронные игрушки» (рис. 1.13) рекомендует такой аналог — КТ117. Кроме того, Войцеховский даёт рекомендации о том, как быть, если под рукой не окажется установленного в схеме транзистора или тиристора (либо их аналогов). Такие детали можно заменить более распространёнными, установив, например, вместо одного, довольно редкого планарного однопереходного КТ117, два попроще — по схеме на рис. 1.14. На ней транзистору ASY35 37 соответствуют МП39 42 (в частности, согласно справочнику по аналогам, ASY35 можно заменить на МП42 или МП20А). Транзисторам BF504 511 соответствуют МП111 113 или КТ312 315. 8. Мобильные аппараты на солнечных элементах
8. Мобильные аппараты на солнечных элементах





