В работе предлагается нейросетевой планировщик перемещений мобильного робота для системы управления движением автономного мобильного робота (АМР). Особенность данной системы заключается в использовании нейронных сетей для формирования коэффициентов квадратичных форм, описывающих желаемую траекторию движения АМР, используя предварительно обработанное изображение препятствия. Представленный планировщик, в частности, может использоваться совместно с синергетическим позиционно-траекторным регулятором, который вырабатывает управляющие воздействия на основе квадратичных форм и не требует блока кинематических преобразований и наличия интерполяторов. Реализация планировщика на нейросетях позволяет распараллелить процессы вычисления и, по сравнению со спецвычислителями, повысить реакцию системы на динамически изменяющуюся внешнюю среду, а также придать системе свойства адаптивности и помехоустойчивости.
1. Введение. Проблемам управления автономными мобильными роботами сегодня уделяется значительное внимание в мировой литературе по робототехнике. В частности, весьма актуальна задача корректного планирования траектории перемещения роботов, действующих в априори неформализованных средах. В работе [I], предлагается подход, основанный на нейроподобных структурах. Контуры препятствий считываются из плана проходимости среды, сформированного в виде бинарных изображений. Затем эти контуры аппроксимируются кривыми второго порядка и представляются в виде траекторий обхода препятствий. Но изложенный в этой работе подход требует наличия дополнительных вычислительных средств для определения коэффициентов квадратичных форм, описывающих препятствия, что снижает производительность функционирования планировщика, а это немаловажно при функционировании АМР в динамически изменяющихся средах. В настоящей работе, предлагается нейросетевой [3] планировщик для систем управления АМР, вырабатывающих управляющие воздействия на основе информации о желаемых траекториях движения, представленных квадратичными формами базовых координат.
2. Квадратичные формы и позиционно-траекторный регулятор. Позиционно-траекторный регулятор - это устройство, необходимое для выработки управляющих воздействий для исполнительной системы робота (электроприводов) на основе входных величин (в нашем случае коэффициентов квадратичных форм), направленных на корректное прохождение роботом заданной траектории. В общем случае уравнение квадратичной формы от базовых координат (окружности, эллипсы, прямые и т. д.), вдоль которой предполагается движение АМР, описывается в матричном виде, как yTN1у + N2у + N3 = 0 (1), где у = (у1, у2)T,
N2 = [a31, a41], N3 = [a51] для двумерного случая. Коэффициенты данного уравнения содержат в себе информацию об угле поворота, размерах и смещении геометрической фигуры. Пересчет коэффициентов при изменении угла поворота фигуры, либо ее смещения относительно начала базовой системы координат предлагается производить по следующим выражениям: N*1 = rot ´ N1 ´ rotT, N*2 = N2 - уTo ´ (( rot ´ N1 ´ rotT)T + rot ´ N1 ´ rotT), N*3 = (уTo ´ rot ´ N1 ´ rotT - N2) + N3, где N*i - новое значение матричного коэффициента;

- матрица поворота;

- вектор сдвига. При использовании алгоритма управления, предложенного в [2], возникает задача корректного определения коэффициентов N1, N2, N3 желаемой траектории движения робота на основе информации поступающей от бортовой камеры робота, которая бы позволяла, в частности, избегать столкновения со стационарными и нестационарными препятствиями в априори неформализуемых средах.
3. Нейросетевой планировщик. Задача планирования, в общем случае, заключается в поиске последовательности элементарных действий на основе имеющейся информации о состоянии внешней среды, которая бы приводила систему в искомое состояние, с учетом накладываемых на нее ограничений и удовлетворяя заданным критериям. Преимущества нейросетевого планировщика по отношению к классическому, основанному на каком-либо вычислительном алгоритме, заключается в том, что, согласно теореме Колмогорова [4], любую непрерывную функцию нескольких переменных можно представить в виде суперпозиции непрерывных функций одного переменного и сложения. Поэтому алгоритмическое решение задачи, реализуемое за счет последовательного соединения различных функциональных блоков, в нейросети решается быстрее за счет разложения ее на элементарные функции и распараллеливания процесса вычисления. Свойство надежности вытекает из избыточности нейросети [5]. Также благодаря обобщающей способности нейросети, решается проблема обработки зашумленной информации, что особенно актуально для изображений, в связи с несовершенством процедур кластеризации и бинаризации. В рамках данной работы, специально для исследования функционирования различных типов нейронных сетей в качестве планировщиков, используя систему Маtlab 6.1, был разработан программный комплекс, внешний вид главного окна которого показан на рис. 1.
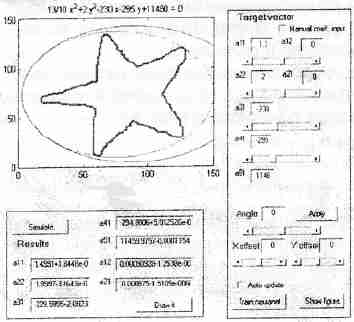 Рис. 1. Внешний вид главного окна программы
Рис. 1. Внешний вид главного окна программы
Данный программный комплекс позволяет: задавать архитектуру нейронной сети (количество слоев, нейронов в каждом слое), функции активации нейронов соответствующих слоев, алгоритм обучения (включая выбор отдельных параметров обучения), функцию ошибки; сохранять в файл и восстанавливать из файла созданную нейросеть; моделировать работу нейросетевого планировщика; производить графический вывод результатов моделирования; загружать изображения препятствий как по отдельности (поддерживаются различные форматы), так и в составе обучающей выборки; задавать целевой вектор (набор коэффициентов квадратичной формы) как вручную для отдельно взятого изображения препятствия, так и загружать в составе обучающей выборки; производить генерацию обучающей выборки (случайных изображений препятствий и соответствующих им коэффициентов квадратичных форм) с гибкой настройкой параметров и т. д. Для выработки коэффициентов квадратичных форм, описывающих траектории обхода, на основе предварительно обработанного изображения препятствия (кластеризованного, бинаризованного) предлагается использовать многослойную нейронную сеть прямого распространения (МНСПР). Перед подачей на вход нейронной сети, в целях минимизации ее структуры и, как следствие, сокращения вычислительных операций, данные требуют предварительной обработки. Для этих целей предлагается использовать процедуру, основанную на преобразованиях Фурье [б]. На основе имеющегося изображения выделяется контур препятствия, и координаты всех его точек заносятся в массив в порядке обхода контура в виде комплексных чисел z, у которых реальная часть есть координата x, а мнимая - у. Полученный массив подвергается быстрому преобразованию Фурье [6]:

где k - номер гармоники, М - количество точек контура. Таким образом формируется изображение контура препятствия в частотной области в виде массива коэффициентов ряда Фурье. Самые значимые из них - это первые l и последние m элементов массива коэффициентов, содержащие информацию о самых низкочастотных и самых высокочастотных составляющих изображения контура. Они составляют входной вектор нейросети. Опытным путем установлено, что оптимальные значения l и m зависят от общего числа точек, описывающих контур, и могут быть определены из следующего выражения: l + m = 0,05М. Так как, в нашем случае препятствия описываются квадратичными формами, то большую ценность представляют высокочастотные составляющие, что можно выразить в форме условия m =1,5l. На рис.2 а, б, в, г приведены исходные и подвергнутые прямому, а затем обратному преобразованию Фурье, изображения «звезда» при различных значениях l и m.
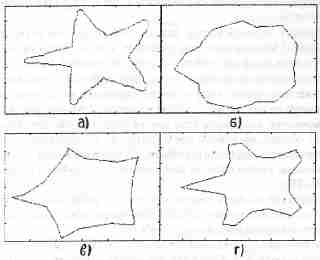 Рис. 2. Результат использования прямого и обратного преобразования Фурье: а) исходное изображение; б) l=3; m = 17; в) l = 17; m = 3 , г) l = 5; m = 15
Рис. 2. Результат использования прямого и обратного преобразования Фурье: а) исходное изображение; б) l=3; m = 17; в) l = 17; m = 3 , г) l = 5; m = 15
В работе предлагается использовать двухслойную структуру сети, с числом нейронов в скрытом слое, определяемом значимыми коэффициентами разложения Фурье, с функцией активации
Число нейронов в выходном слое определяется количеством коэффициентов квадратичных форм и равно семи, а их функция активации предполагается линейной. В связи с использованием функции активации tansig необходимо производить нормализацию входных данных путем умножения всех элементов на масштабирующий коэффициент 1/F(1), где F(1) - первый и максимальный по модулю элемент преобразования Фурье. В частности, при размерах изображения 150 х 150, для адекватного представления фигуры, требуется 20 элементов преобразования Фурье, которые подаются на 40 входов нейросети (20 для реальной части и 20 для мнимой).
4. Обучение и тестирование. Формирование обучающей выборки производилось с учетом того, что препятствия могут иметь различную форму, размеры и располагаться в любой части цифровой картинки. Для этих целей использовалась программа для генерации обучающих выборок в составе описанного ранее программного комплекса. Генератор обучающих выборок функционирует следующим образом. На первом этапе формируется массив сгенерированных случайным образом изображений препятствий. Затем для каждого препятствия в цикле подбираются коэффициенты квадратичной формы, описывающей данную фигуру и имеющей при этом минимальную площадь. Далее, все эти данные сохраняются, чтобы можно было в дальнейшем их использовать для обучения. Опытным путем было установлено, что наилучшая сходимость обеспечивается при обучении с использованием алгоритма градиентного спуска с возмущением и адаптацией параметра скорости настройки. Следует обратить внимание на то, что уменьшению времени сходимости обучения способствует нормализация целевого вектора, при которой его матожидание равно нулю, а среднеквадратичное отклонение - единице. Нейронная сеть обучалась на обучающей выборке, состоящей из 200 элементов в течение 3466 циклов. График обучения представлен на рис. 3 (прим. ред.портала: поскольку исходная иллюстрация была не вполне качественная, поясним, что наверху надписи означают: Performance is 0,0999819, Goal is 0,1).
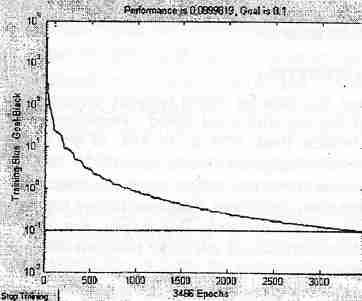 Рис. 3. Зависимость величины ошибки от номера цикла обучения
Рис. 3. Зависимость величины ошибки от номера цикла обучения
Результаты моделирования работы нейросетевого планировщика на тестовых выборках демонстрируют корректность предложенных структурно-алгоритмических решений в определении коэффициентов квадратичных форм (рис. 4), а также высокую устойчивость к помехам.
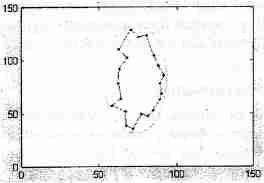 Рис. 4. Результат тестирования
Рис. 4. Результат тестирования
5. Выводы. Предложенный в работе нейросетевой планировщик траекторий движения для системы управления АМР позволяет описать произвольные препятствия квадратичными формами базовых, наблюдаемых координат, что позволяет выработать адекватные управляющие воздействия, используя уже известные алгоритмы [2]. Предложенные решения могут быть использованы при организации сложных перемещений мобильных роботов в априори неформализуемых динамических средах, когда требуется переход с одного типа траекторий на другой, в зависимости от решаемых задач.
ЛИТЕРАТУРА
1. Pshikhopov V., Chemukhin Y. Path Following Regulator for Neural Network Implemented Control System of Adaptive Mobile Robot Moving with a Set Speed . Proceedings CD (without pages numbers, 5 pages) and Abstracts Book (473 p., p. 354) of Int. Conf. «Mathematical Theory of Network and Systems», Pcrpignian, France, June 19-23, 2000.
2. Пшихопов В. X. Аналитический синтез синергетических регуляторов для позиционно-траекторных систем управления мобильными роботами. Сборник трудов научно-технической конференции «Экстремальная робототехника» .Под научн. ред. проф. Е. И. Юревича. Центральный научно-исследовательский институт робототехники и технической кибернетики. Санкт-Петербург, 2001. С. 59-68.
3. Люггер Джордж Ф. Искусственный интеллект: стратегии и методы решения сложных проблем, 4-е изд. Пер. с англ. М.: Издательский дом «Вильямс», 2003.
4. Нейронные сети: история развития теории. Кн. 5: Учебн. пособие для вузов / Под общей ред. А. И. Галушкина, Я. 3 Цыпкина. М.: ИПРЖР, 200). (Нейрокомпьютеры и их применение).
5. Мак-Каллок У. С. Надежность биологических систем: Самоорганизующиеся системы. М.: Мир, 1964.
6. Осовский С. Нейронные сети для обработки информации. Пер. с польского И. Д. Рудинского М : Финансы и статистика, 2002.
По докладу Сиротенко М. Ю. на Научной школы-конференции «Мобильные роботы и мехатронные системы-2003»
РЕТРОСПЕКТИВА
Служебный синдром. При разработке закона «О лицензировании отдельных видов деятельности» в комитетах Госдумы основной причиной исключения юридических услуг из области лицензирования называлось то, что этот вопрос необходимо регулировать специальным законом и решать иными методами: например, говорилось, что в сфере частной юридической деятельности уже существует единая система контроля со стороны органов юстиции. Такой подход вызвал у частнопрактикующих юристов (в особенности у адвокатов) опасения, что под предлогом наличия в их среде скомпрометировавших себя на госслужбе лиц частная юридическая деятельность будет поставлена в чрезмерно жесткие рамки. ВН (видеонаблюдение) здесь не исключение: оперативная видеосъемка регулируется специальным законом, ее осуществляют сотрудники правоохранительных органов (по квалификации — юристы), эти органы контролируют применение спецтехники частными структурами. И, видимо, контроль будет жестче, поскольку именно на частных охранников кивают в связи с обнародованием видеокомпроматов.
And whence the robot - bed belonging knows this law? - She has thought up it. / А откуда робот-постельная принадлежность знает этот закон? - Она его придумала.Но из этой же логики следует и более важный вывод: рассуждая от обратного, если частный охранник применяет средства ВН, он формально становится частнопрактикующим юристом, ибо цель ВН (и тем оно выделяется из прикладного ТВ) — пресечение ПРАВОнарушений, а юрист, по определению, — «практический деятель в области права». Тот, кто возразит такому выводу, забывает: закон от 1904 г. о полномочиях Департамента полиции, установивший слишком низкий статус агентов, осуществлявших наблюдательные функции, имел для Николая II, утвердившего тот закон, известные последствия. Сегодня же недооценка статуса охранников вообще и операторов ВН в частности поставит все общество в не менее сложное положение.
Что мы сейчас имеем? Никому не известное количество скрытых камер фиксирует поведение граждан. И ладно бы еще поведение в стиле порнокомпроматов, уже показанных по телевизору. Однако, по ряду признаков, более выгодной становится съемка другого рода — учитывая, сколько чиновников, политиков, деятелей культуры, бизнесменов и пр. выдвинуты на свои посты от «голубой партии». Под угрозу передать такой порнокомпромат набирающим в России силу организациям, декларирующим, в числе прочих своих задач, дискриминацию лиц с «неправильной» ориентацией (этакий «список Шиндлера» по геям), видеонаблюдатель потребует немалые деньги. Но это, как говорится, их разборки, а общество волнует иное: не нарушится ли психика операторов ВН, снимающих оргии? Не обернется ли это всплеском насилия вследствие синдрома наподобие вьетнамского?
Можно более-менее не волноваться, когда наблюдение ведет бывший или действующий офицер спецслужбы, прошедший юридическую подготовку: она, как и подготовка хирурга или редактора, закаляет сознание, заставляя без эмоций препарировать информацию. Высокий статус является автоматическим следствием такой подготовки. Но вот, например, в охрану учебного заведения нанимают просто молодого здорового парня, который потом ежедневно облизывается, когда мимо него снуют созревающие не по дням, а по часам старшеклассницы. Он для них — часто просто «псина», поскольку у него низкий статус. А являющееся причиной отсутствия статуса отсутствие специальной интеллектуальной подготовки будет в данной ситуации провоцировать на совершение сексуальных преступлений.
Очень хороший путь для поднятия статуса видеонаблюдателей подсказала Хартия телерадиовещателей, реально поднявшая статус ее подписантов. При этом в тексте Хартии есть положения, непосредственно касающиеся сферы ВН, что можно рассматривать как прецедент для подписания аналогичной Хартии видеонаблюдателей. И тогда роли поменяются: если сейчас ТВ-авторитеты присвоили себе право демонстрировать в эфире личную жизнь известных юристов, то потом юристы получат право наблюдать за личной жизнью телевизионных звезд, и тогда все увидят, на что те способны вдали от своих телекамер. Ни на что! А. Барсуков, журнал "ТКТ", № 10, 1999 г.
Серия сообщений "Машинное обучение":Обучение компьютерных систем. Компьютерное зрение.
Часть 1 - Тема электронного слуха на VI Международной конференции «Цифровая обработка сигналов и её применение» (по материалам РНТОРЭС им. А. С. Попова)
Часть 2 - Технологии Intel на Форуме IDF в Москве
...
Часть 7 - Искусственный секс: от пещерного человека до космических кораблей
Часть 8 - Анализ и поиск видеоинформации
Часть 9 - Нейросетевая система планирования траекторий мобильного робота
Часть 10 - Слух роботов
Часть 11 - Всякий умный дом только тогда чего-нибудь стоит, когда он умеет себя защищать
...
Часть 47 - Внешность какой киноактрисы предпочтительнее для женщины-робота?
Часть 48 - Тест Тьюринга и робототехника
Часть 49 - О роботизации сбора грибов
 - вектор сдвига. При использовании алгоритма управления, предложенного в [2], возникает задача корректного определения коэффициентов N1, N2, N3 желаемой траектории движения робота на основе информации поступающей от бортовой камеры робота, которая бы позволяла, в частности, избегать столкновения со стационарными и нестационарными препятствиями в априори неформализуемых средах.
- вектор сдвига. При использовании алгоритма управления, предложенного в [2], возникает задача корректного определения коэффициентов N1, N2, N3 желаемой траектории движения робота на основе информации поступающей от бортовой камеры робота, которая бы позволяла, в частности, избегать столкновения со стационарными и нестационарными препятствиями в априори неформализуемых средах.  Рис. 1. Внешний вид главного окна программы
Рис. 1. Внешний вид главного окна программы Рис. 2. Результат использования прямого и обратного преобразования Фурье: а) исходное изображение; б) l=3; m = 17; в) l = 17; m = 3 , г) l = 5; m = 15
Рис. 2. Результат использования прямого и обратного преобразования Фурье: а) исходное изображение; б) l=3; m = 17; в) l = 17; m = 3 , г) l = 5; m = 15 Рис. 3. Зависимость величины ошибки от номера цикла обучения
Рис. 3. Зависимость величины ошибки от номера цикла обучения Рис. 4. Результат тестирования
Рис. 4. Результат тестирования





