Добавить любой RSS - источник (включая журнал LiveJournal) в свою ленту друзей вы можете на странице синдикации.
Исходная информация - http://www.360cities.net/. Данный дневник сформирован из открытого RSS-источника по адресу http://www.360cities.net/rss/rss.xml, и дополняется в соответствии с дополнением данного источника. Он может не соответствовать содержимому оригинальной страницы. Трансляция создана автоматически по запросу читателей этой RSS ленты. По всем вопросам о работе данного сервиса обращаться со страницы контактной информации.[Обновить трансляцию]
360° panorama by Gary Davies. Click the image to open the interactive version.
The Cathedral Church of St Peter and St Wilfrid is the fourth church to occupy the same site. Originally founded as a monastery by Scottish monks in the 660s, it was rededicated as a Benedictine monastery by St Wilfrid in 672. It was destroyed by the English King Eadred in 948, with only the 7th century crypt surviving. After rebuilding it was again devastated in 1069 by William the Conqueror. A third church was constructed under the watch of Thomas of Bayeux, the first Norman Archbishop of York. The current church was rebuilt again in 1180 to promote pilgrimages to Wilfrid's crypt. It gained its famous west front in 1220, when the twin towers were crowned with wooden spires. The building was badly damaged during the Wars of the Roses and the English Civil War. It was established as a collegiate church by charter of James I in 1604, which lasted until the 19th century when the first English post-Reformation diocese was formed, thus Ripon Minster became Ripon Cathedral.
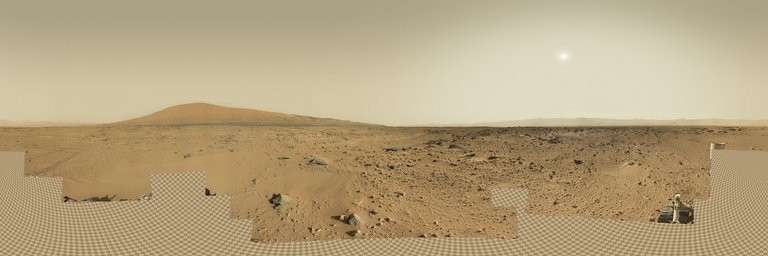
360° panorama by Andrew Bodrov. Click the image to open the interactive version.
NASA's Mars Exploration Program (Image credit: NASA/JPL-Caltech/MSSS) Sol 550: Bungle Bungle The images for panorama obtained by the rover's 34-millimeter Mast Camera. The mosaic, which stretches about 30,000 pixels width, includes 113 images taken on Sol 550 (February 21, 2014). The Sol 549 drive brought the rover close enough to the outcrop dubbed Bungle Bungle to allow MAHLI and APXS measurements, so the Sol 550 plan focuses on contact science. First, ChemCam will zap and image the outcrop, then the arm will be deployed. After the contact science has completed, the rover will drive about 22 meters to get a better view of the path ahead. Other panoramas of Mars by Curiosity rover: http://www.360cities.net/sets/curiosity-mars