������� ���������� ������� � �������� �������� ���������� |
(� ����������� � ����� ����������� jul305a@gmail.com)
����������� ����, ��� ������ ����� ���� ���������� �� ����, ���� ��� ���, � ������ �� ���������� �����
� ���, ������, ������� �� ������/������� ��������� ����������, ���, ��� ��������� ����, � ��� ��� � ��� ����, �� ������������� � �������� ����:

#���������� � � ��� ��� ��� ������ � �������������� ������� ������ � ����� �����������.
�� � ������ ���� ��������� �������, ����� ���������� ���������� �� ���������� ��������� ������/��������, �������, ��� ������� � �������, ��������.
�������� ��� �����������. ��������� ���������� ������ �� ���������� ��������� � ����������, � �� �� ������������ � ���������. ������ ���: ���� ��������� - ����� ����� ����������� � ������� ���������������� ���, ������� ����� � ������, � � ����������������, ����� �� ������� ����������� � �����.
������� �������� ��� �� �� � ��� � ����� ����, � ����� ������� ������ ������������� �������, ���������� ��������� ���������������� �������:
��� , -���������� ����������
��� ��� ��� ���? ���� ���������������� ���������, �� �� ������� ���������� �������� � ������ ����� , �� ����, ���� ���������� ����������, ���� � �����. ������, ��� ���������� ����� ������ ���������� ����������� � �������� �������� .
���� ������ ������ � � ������� �������� ��� �������, ����� � ���������� ��� ������ �������������� ��������, �� ��� �� ����� ������� ��� ��� ������������� ����������� �������� ����� ��������� (���������) ���:
� � ������� ���������������� ���� �� �������� ���� �����.
��������� ������ �������� ���� ������������ �����������. ������� � ��� ���������� , ������� �������� ��������� ��� ��������:
����� ���������� ������������ ����������
��� ���� �� ������� �� �����, ��� ��������� ���������, � ��, ��� ����, ����� �� � ��� ����, ���� �� �������� �������, ��� ���� ����� ��� ������ ������ ���������� ������� ��� ���������� .
��������� ���� ���� � ��--���� ������� �� , �������������� ����������� �� , � �� ������ ����� �� ����, ����������, �� ����������, �� ���� ��� ������ ������ �� ���������. � ������ ��������������� �������� �� ����� �� ����� � ��� ������ �� �������������� ������� �������, ��� ��� � ���� ������ �� ������ ����� ��������� ������ �������� (�, ��������������, ����������) � ������� �� ������.
��� ����, ��� ����� ��������, ������ ���� <<����>> �� ����� �������� ��������, ��� ��� ��� ����������, ���� � �������� ������� ������������, � ���� ���� ��������� ��������, ������� ���� �������� ��� ���� ��������:
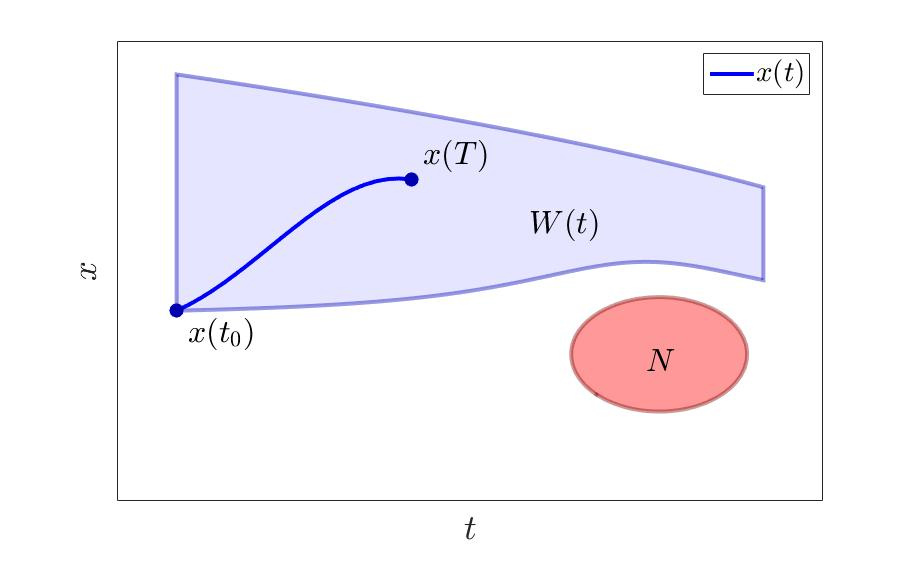
���������������� ������������ ���� �������������� �������������, ���������, ��� ����� ������ ����������� ���� ������ ��� ��������� �������� � ������������ :
����� � ���������� ������� �� ���������,
����� ������ �������� �������� �� �����
����������� �� ���������� ����� ���
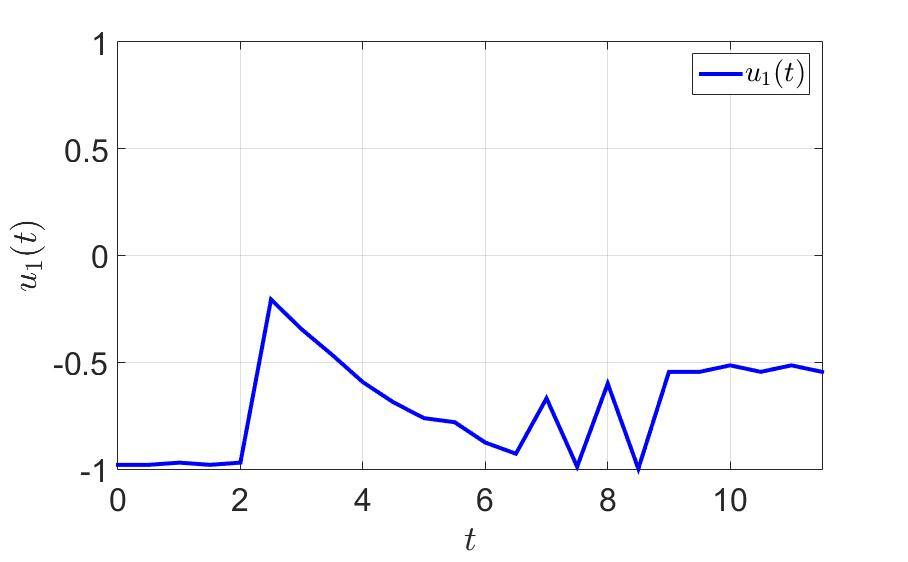
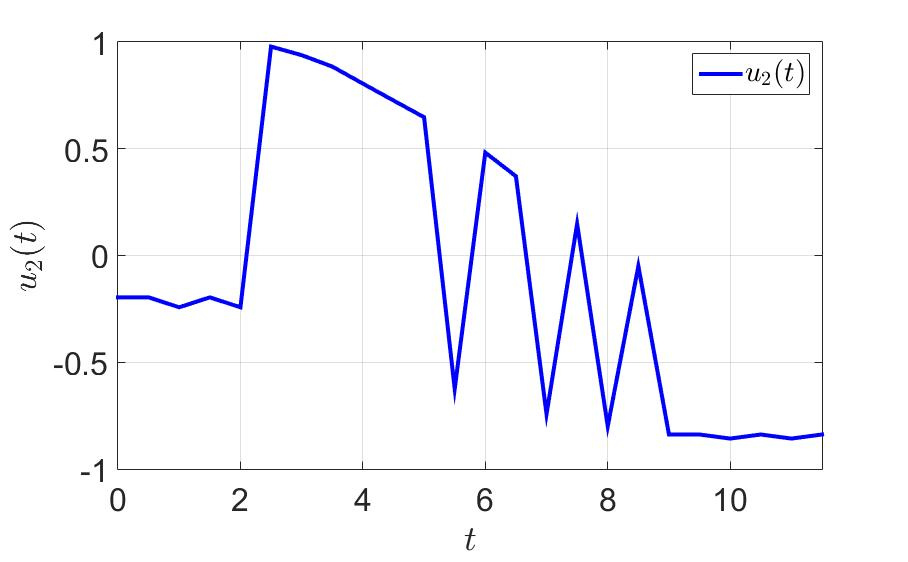
������ ����� ��������� ��������� ���������� ������� �� �������� ����� �� ������������ ��������� � ���� ������� 1 � ������� � ����� , ������� ��� ���� ��������� �� ��������� ������ � ���� ������� 2 � ������� � ����� .
����� ��������� ���������� ���� ������ ������� .
���������� �������� ������� � ���������� ���������� ������� ������ �������� �� ��������� ��������.
���������� �������� �������.
����������� ������ ���������� ���������� �� �������.
����������� ������ ���������� ���������� �� �������.
������ ������, �������� ����� ��������� �����������, � ������:
����� ����, ��� ������ ������� � ��������� ��� ��������� �� ��������� �� ����� ����� � ����� ����� (��� � ���������� ����� �������� ������������ ��������������, � ���� ������ ���� �� �������), ����� �� ������ ��� ���������� ��������� �������.
������� ������ �� ���� ��� �����: ���� ���� ������� ������� ���������� �� ����, � �� ��������� ���� ������ ���������, �� ����� ����� �����, � ������� ������� ����� ����� ��� ����, � ���������� ����� �� �� ��� �� ������������� ����. �����? �� ������ ������������� � ��.
�� ��� �� ������� ���������, ��� ����������. ����� ��������� ���������� ���� ������ ������� ����������� ����� � ��� ���� � �� . ���������� ������������ ���� ����� �����������. ���� �� ������� � ������ ���� �� �� ��� ����� ���������� � ������ ������� ��� ��������.
���������� �������� ������� � ���������� ���������� ������� ������ �������� �� �� ��������� ��������.
���������� �������� �������.
����������� ������ ���������� ���������� �� �������.
����������� ������ ���������� ���������� �� �������.
��� ��� �� ����� ���������� �� ������ ��������� � ���� ������ �������, �� ����� ��� �� ������ ��������� �������������� ��������� ����� �������, �����, ��������� �� ����, �� ( �������� � ������������ ���� �� �������) �������������� ����� ��� ���� �������� � �����, �������� �� ���, � ������� ��������� ������. � ������� �� ��� ��������� �������:
���������� ��������������� ��������� ��������� ��� ����������.
�� ���� ������ �������� �������������� ���������, �� �������� ����� ����������, ���������� � ���� ������������ ����� �� ��� �����, � � ��������� ���������, ��� �� �������.
��� ����, ����� ��������� ���������� ������������ ��������� ���������� �� ���� ����������� � ������, ��� ��� ������� ������������� ����������� � ���� ������ �������� ��������� �, ��������������, ���������� ��������� ������������� ������ �������. ���� � ��� ������ ������� ���� �� ������� �������, �� ������ �����, ���������� � ��������������� ����� ������������, �������������� �� � ������� ������.
� �������� ������ ����� ������������ ������ ���������������� ���, ������� � ����� ������ ����������� ����� ���������� ����������� [1] (���� �� ������ ��� ����� � ����������� ���������, �������� � ������� �����, ��� ���������, ����� ��� �� ������) � ���������� �������� ������������ [2].
��� ������� ��� ����������� ��� ���������:
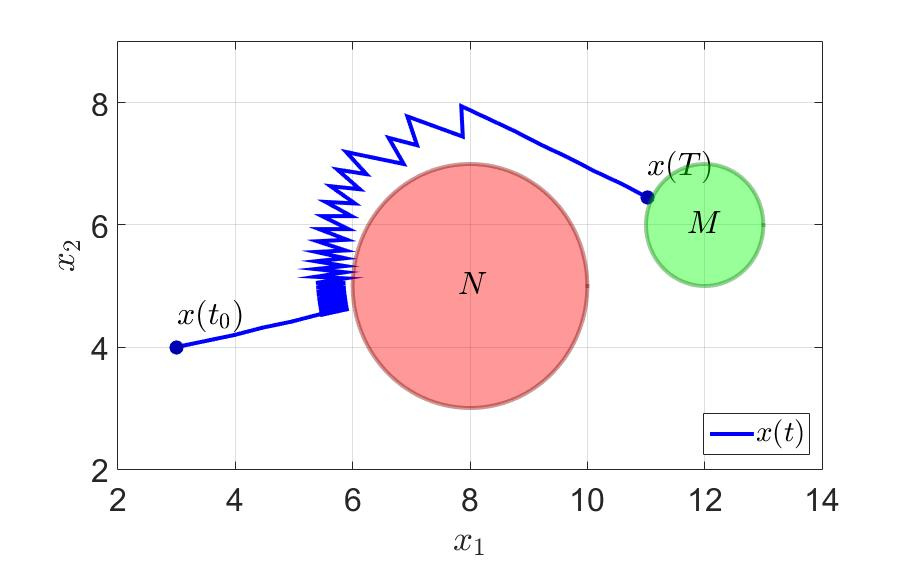
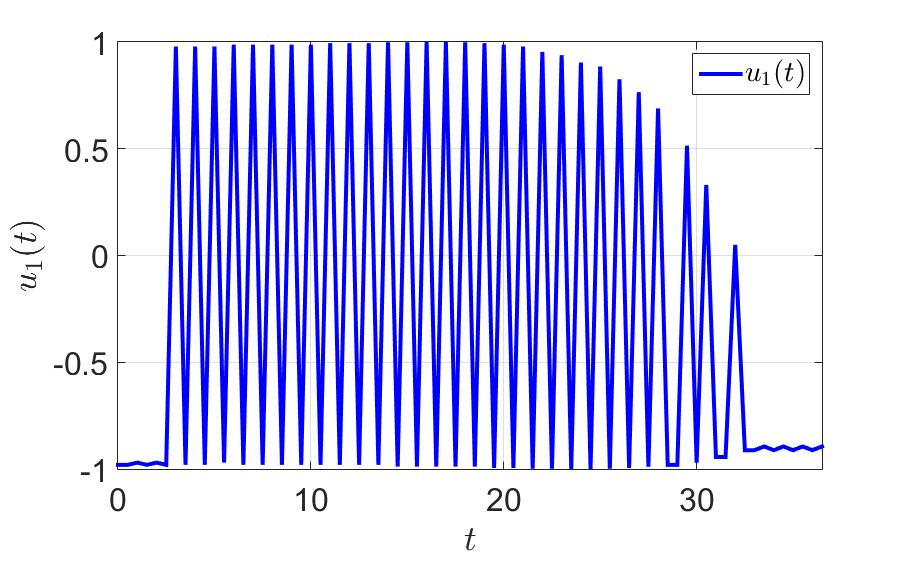
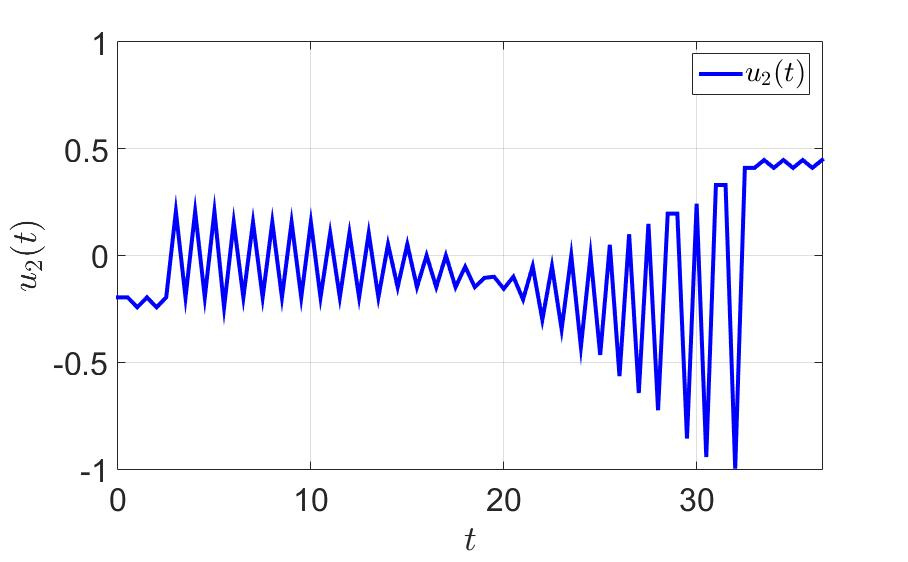
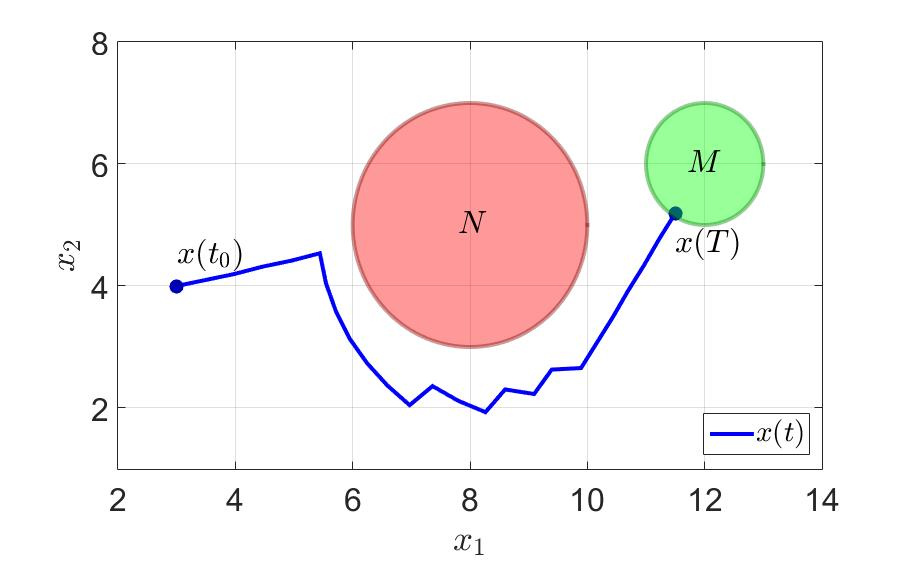
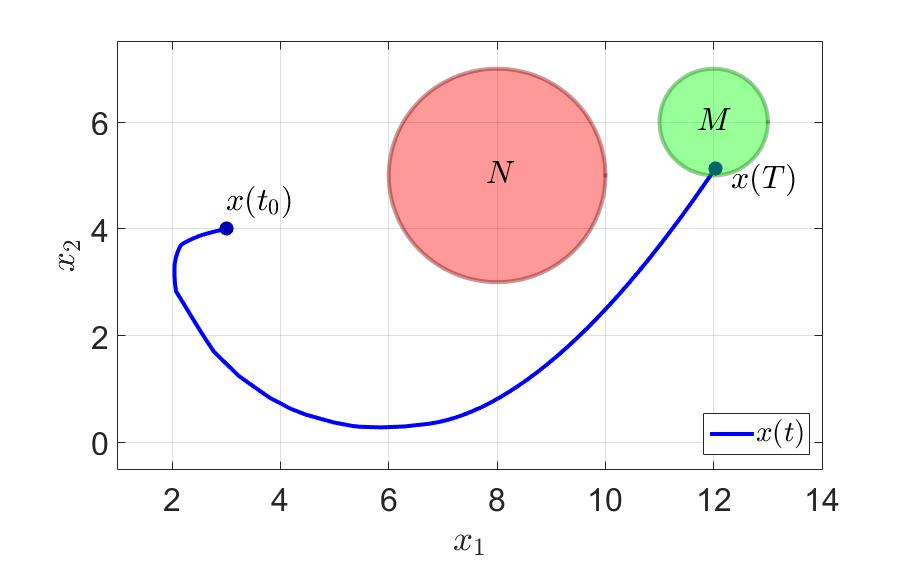
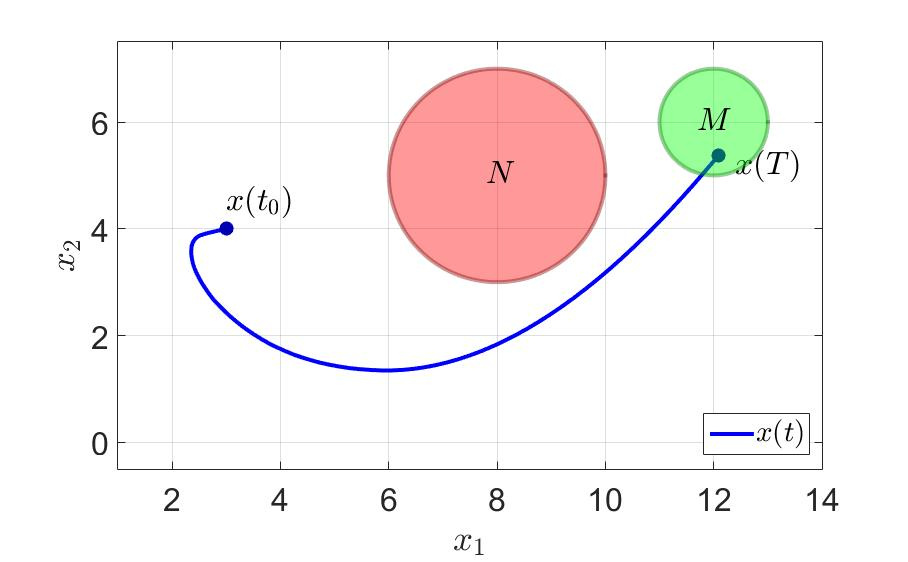
� ������ ����������, ��� ���������� ������ �� ����� ��� ����� �������, ���� ����� ��������� ��� ����� �������, ����� �������� �������� ��������� � ������ ���� �������� �������, �� ������ � ������ ���� ����� �� ������ ���� ���������. �������� ��� � ������ ��������� ������� � ��� ������ ����� ������� � ��������� ���� �������� ���� ��������� ���������� ������ ��������� � ������� ����� ������� ����� , ����� ���� �������� ���������. �������� �������� ������, �� ��� �������� �������� � �������� ������ ����� �� ���������� ���������, ��������� ������� ��������� �������, � ������� ������� � ����� ��������������� ����� [4]. ���������� ������ ��������� ������ ������ ��������� ������� ������, ������ � � ������ �.
��������� �� ��������� $M$ � �������� ���������� ������.
��� �������� ������� ��������� � ��������� ������ ������ ����� ����� ������� ��� � �� �������� ��� � ����� ����������, �� ����� ��������� ������� � ������� �� ��������:
�� ���� ��� ���������� ��������� �� �������� �� ���������� ������ ���� � ����� ������� ������� (��� �����������), � � ����� ������� (��� ��������) ����� ���� ���� ����������� ��, �� �������� ���������� ����������?
��������� �� ��������� .
����������? ������������? �� �����. ������� ���� � "����� � �������" � ��� "���������������-��������� �����������" ��������, ��� � ��� ���� ��� ���� ���������� � ����� � ����� ���������� ������� "������������" � "���������" ����������� � �������� ��� ��������� ������� ����� ����������, ��� �� ������ ��������� � ������������� ��������� � �� ����� �� ��������������� ����������� � ���������� ������������. ���� �������� �������� �� ���������� ����� ������� "������-������" � "������������-���������" ��������������� ����� �������.
� ���� ������ ������� ����� ������� ���������� ��������� �� �� ��������� �� �������� ��� ���� ���������� , � �� ��������� � ������� ��� ������������� (� ��� ���������� ����� ������������� ������� ������) � ������� ��� ����������� �� ��������������� ��������� �������� � ��������� � �.�. �������� ������ ������� ������������ � ������� ������ ����� ����� �������� � ����� ������������� ��� �� ��. ���������� ������ ��������� � ������ ������ ���� � ��������� �� ���� ����� ������ ������ ��������� ������� ������, ������ � � ������ �.
�������������� ����� ���������� ���������� ������� ������ ���, ����� � ������ ������ ������� �� ����� ������ ���� �� ���� ��������.
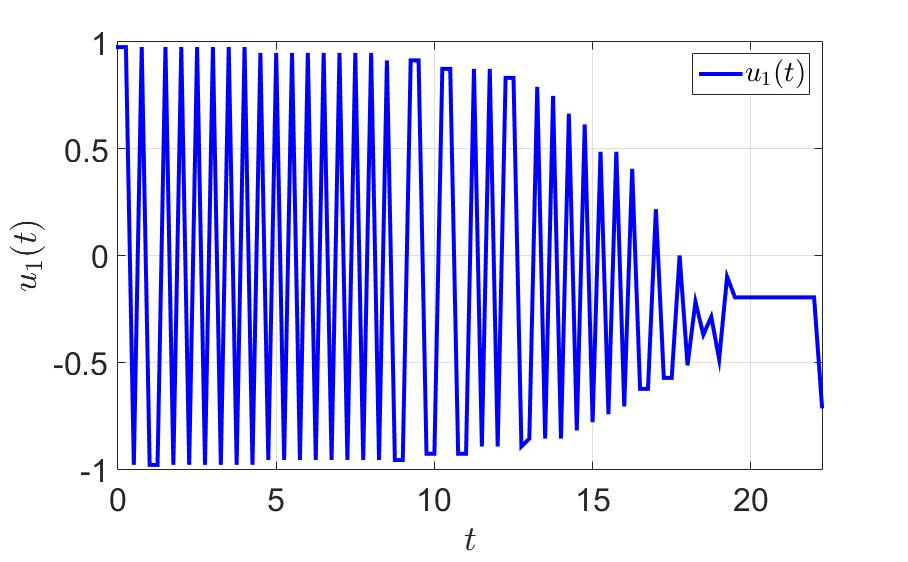
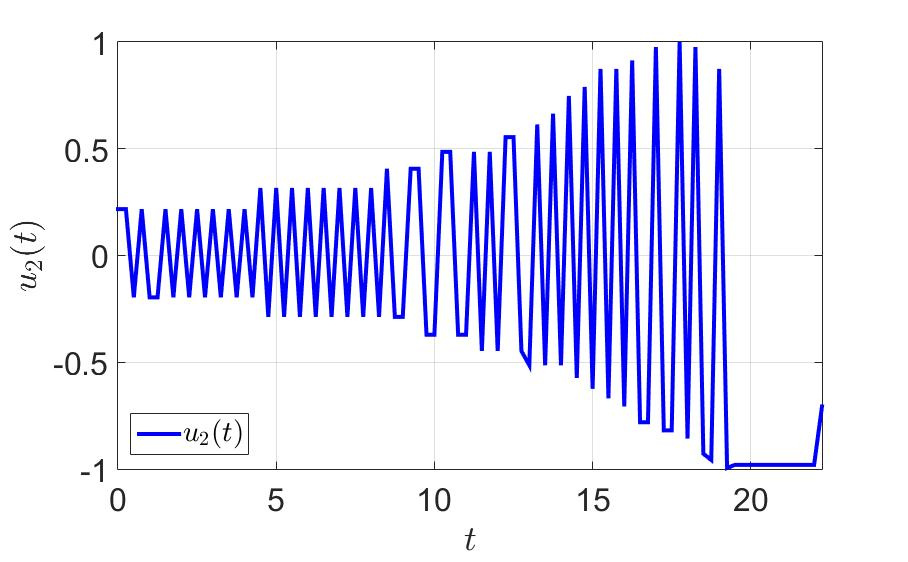
����������� ������ �������� ������ ������� , � --������ ���������� ������������ ��������� �������� ���������������� ���������:
��� ; � �������� �������� �� ���������� ����������� ; � ���������� �������, , ��� ������������ �������������, �������������� � ������������� ��� ���� ������� ������ ����.
������ ��������� � ������������ ������� ������, ������ ��������� � ������������ ������� ������.
�������� ���������� ��� �� ���������� ��������� � ��������� ��� ������������ ��������� �� ������ ������� .
� �������� ��������� �������� �������� ��������� ��������� � . ��������� �������� ������������ ���������� ������� ������. ���� ������� ������ � �������� ���������� ��������� ��� ��������� . ��������� �������� ������������ ���������� ������� ������ � ���������� ������ ������� ������. ���� ������� ������ � �������� ���������� ��������� ��� ��������� . � ������ ������� ��������� ����� �� ���� ��������� ������� ����������� ������ �������. �������������� ������ ������� ������ � �������� ��������� ����� �� .
���� ��������� ������� ����������� ������ ������� � ������ ������� ��������� ����� �� ��� �������, ��� ��� ���� ���������� �������� ������� ����� �� ���� �� �������� �� . ����� �������, ���� ������� �� ���������, � ����� ��������� ��� ������������ ������������������ ���������� .
����� �������� ������������� ���������������� ���� � ����� ������ ������� � ������� �������.
A: ��������������, ��� ������ ����� �����:
�������������� �����, ��� ������ ����� �������� ���������� ��������� �� ������� ��� �� ����� , �������� �������� ��������� ����.
��������� ��������� ������� ������ ��� �����������, ������������ �� ��������� ������������ ��������� ������� , � ���������� ��������� ���������: ��� ������������ ��������� , ������� �������� �� � .
������ A: ����� ��������� ��������� , ��� ������� ������ ����� �������� ����� ����������, ��� ��� ������������ ��������� ���� ��� ������������ ��������� �� ����� ���������� ��������� �������. ����� ��������� ����� �������� ��������� ������ A.
�:������ ����� �������� ������ ����������� � ���� ����.
��������� ��������� ������� ������ ��� �����������, ������������ �� ��������� ������������ ��������� ������� , � ���������� ��������� ���������: ��� ������������ ��������� , ������� �������� �� � .
������ �: ����� ��������� ��������� , ��� ������� ������ ����� �������� ����� ����������, ��� ��� ������������ ��������� ���� ��� ������������ ��������� �� ����� ���������� ��������� �������. ����� ��������� ����� �������� ��������� ������ �.
����� �������, ��� , ��� � �������� ��������������� ������������ , � �������� �������, . ���������� , ��� � �������� ��������������� ������������ , � �������� �������, . ��� ���� � �������� �������������� �������������� �� � , . ������ ���������� ����� ��� ����, ����� ������, ��� ���� � ��� � ����� ������ (� ��� ������� ����������� �������� ��� ��� � ����) ������ � ������������ ������� ����������� ��� ����������� ������� ���������������� ���������.
���������� ������ � � ������ ������������� ������ ������� ������� � �������� ��� �� ��������� �����, �� �������� ������ ������ ����� ����� �������. ��� ���, ��� ��������� ���� ����� ��������� �������� ������ ���������� ������� ��������� � ���������������� ����� � [3], [5]. ��� ��� ���������������� ����� ���� ���� �������� �������� ���������, ��� ��� � -��������� (�.�. ��������� ������� ������ ��� ��������� ������� ������), � ����� ������������ ���������� ������� ������������� �������� ����� ��������� ���� [6, ���. 56] (��� ��������, ��� ���� � �������� ���������) � �.�. �� � �����.
�� [6, ���. 69 � ������� 17.1] �������, ��� � ���� �������� ����� ��������������� �������� �� ������������:
��� ������ ��������� ������� � ���������� ����� ���� �� ���� �����������:
1) ���� �������� ��������� , ������� ��� ���� �������� ��������� ������� �� �������� ����� . �� ����, � ������ ����������� ��������� ������� ������ ��������� ������ ������������� (������ �).
2) ����, � ��������� ������, �������� ��������� , ������� ��� ���� �������� , ��������� ��������� �� ��������� -����������� ��������� $N$ ������ �� ������� ������� . �� ����, � ������ ����������� ��������� ������� ������ ��������� ������ ��������� (������ �).
��� ����, ����� -������������ ��������� �� �������� [6, ���. 62 � ������� 15.1] �������, ��� �������:
�������� ����������� �������� ������� ������ ��������� ������� ������ �� ��������� ������� �� -����������� ��������� � ������� ������� .
���� ������� ������� ������, ������������ ���������� , ����������� ������� ������� ������, ������������ ����������� � , �� �������� ����� ����� , ��� .
������������� ������� , ��� �������� ��������� ��������� , ������������ ������������ ������ � �� ����� �� ��������� .
�� ���� ����� ��������� ��������� , ��������������� �������:
�������������, ��� ����, ����� ���������� ��������� �� ��������� , ���������� ��������� ����������� ���� ������� ��� ��� �������� ������� ������� , ��� � ��� ���� ����������� �������� ������� �� ������� .
��������� , ����������� � ����:
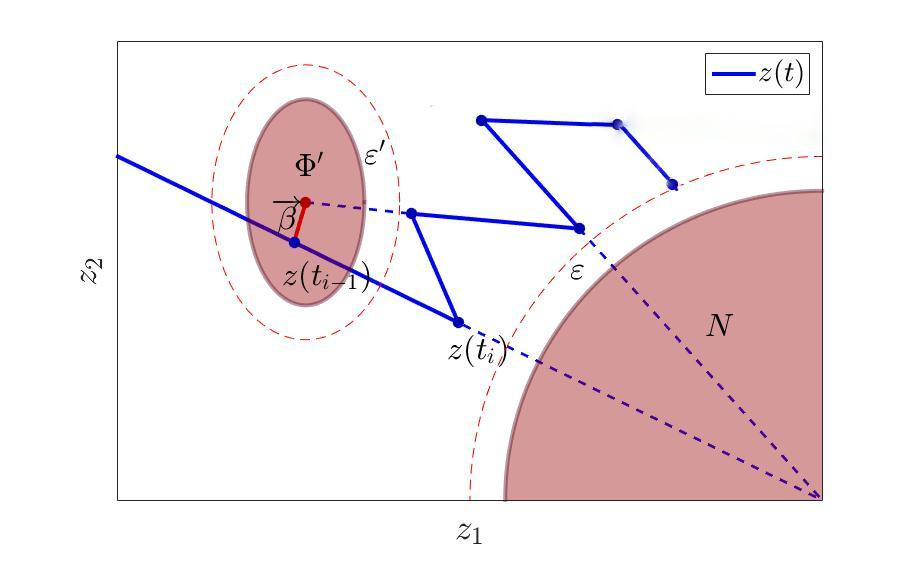
������������� ����������� ���������� ����� ��������������� � ��������� � ������ ������� , �� ������� ������������� ����� ���� ��������� �������. ������ � �����-�� � �������, ��� ������������ ������ �� ������ �� ����� ����� (�� �� ����������), �� ������� ������ �� �� ����������, ��� �������.
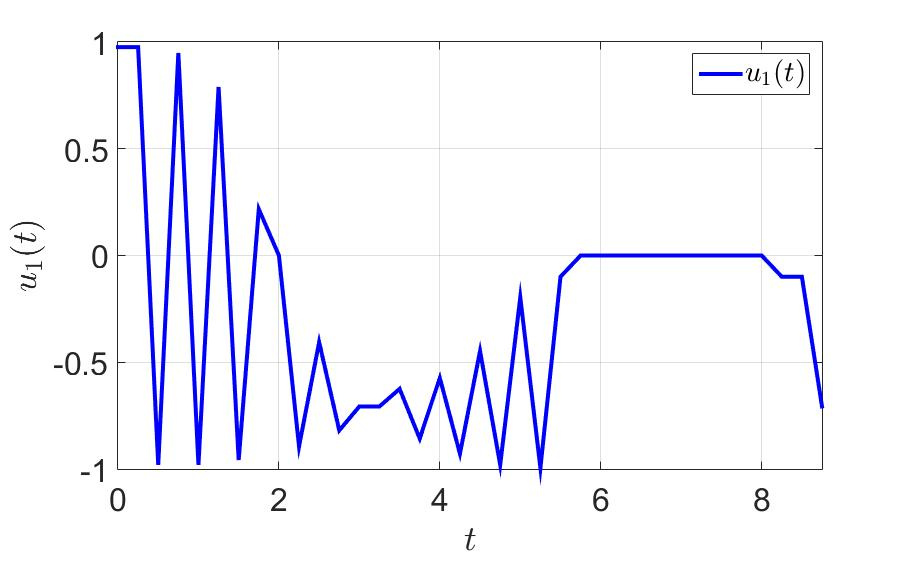
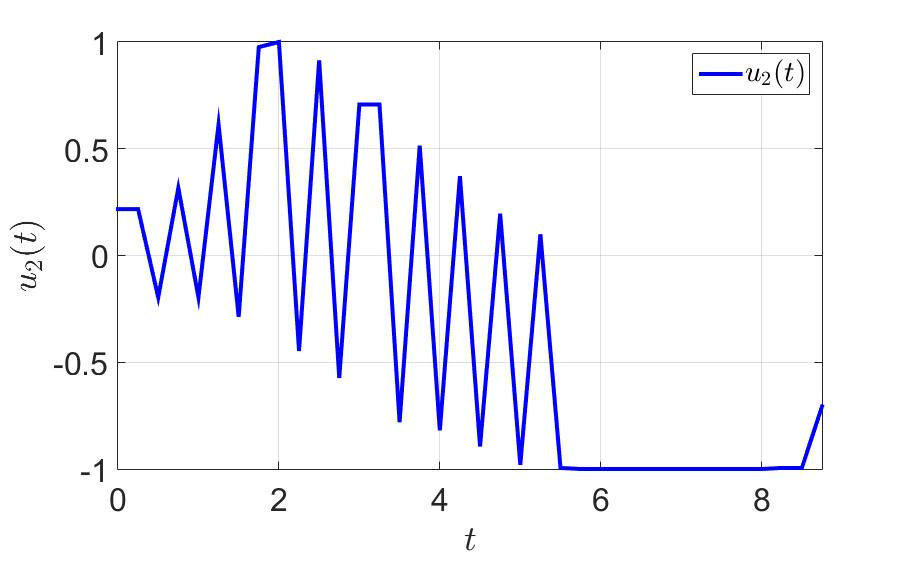
�, ���� ��������� ���������� �� ��������� ����� ������� �����, ��� ��� ��������� ����������� �������� ������� ������� �������, �� �� ������� ��� �������� ��������� �������: ����� ��������� ������ � ��� ����� ������� 5, ��������� ���������� ����� ������� 2, � ������ -- �������������� 1, ����� ����� �� ������� �� ������ ������������ ������ ����� �� ������ ���� ������ 4. ���������� ����� ��������� �����.
����������� ������� ����� ������ ������ ��������� �� ��������� � �������� ���������� ������. ��� ���� ����������� �������� ��������� ���������� ������� �� ��������� �������� �������:
����� ������ ����� ����� �������� ��������� ������ �� ������, ��� �� ����� . ��� ��������, ���� ������ ����������� ��������� ���������� ������� , ��� ������ ����� ����� �������� ������ �� ������, ��� �� ����� �� �������:
����� ����������� ��������� ������ ������� ������� (��������� ���������� ������ �) � ������ ������������ ��������:
����� ������ �� � ������ ������� ���������, �������� �� ������ ������� ������ �� ��������� ���� .
����� ������� ���������� ������� ������, ������, ��� ��������� ��������� �������������.
�� ������� ������ �������� ��������� �����������:
������ ����� ������� �� ������ ������� ������������� ��������� :
� ��������� ������ ��������� "������� �����" ��������� ������ ������� ������;
��� ����������� ��� �� ����, ��� �� ��� ��������� ��������� ������ ��������� ��� ��� ������� � ���� �������� ������ �����.
���������� ������ ��������� ������� ������ �� ��������� �������� �� ������ ��������� �� ������� ��������� .
��� ����, ���� ��� ����� ���� ��������� ����������� ���� �������������, �� ��� ����� ��������� �������� , ����� ��������, ��� ���������� ����� ��������� ���������, ��� ���������� ����� ����������� � ���������� ��������� ����� ����� ������ � �������� ������ �� ���� ����, � �� �� � ���������� ��������.
���, �������� � ��������������� �� �������, ��������, ��� � ����������� �� ���������� ���� ������ ���������� ��������� ���������� ����� ���� � ���������� �� �������� ��� ����� �������.
��� ����, � �������� ��������� ��������� ����� ������� ���������� �������������� ������, ��������������, �������� ������� �� ������������ [6, ���. 69], ��������� �� ��������� � ����:
���
��� ��� ����������� ������� ����� 15.2 [6, ���. 65], ��, �������� � ��������������, �������� ������ ������ ��� ������������ ����������� ���������� ����� ����������� � ���������� , ������� ��������� � ��� ����������� ���� ��������� �� �������.
���������� ������ ������ ��������� ���������� ������� �� ������������ ��������� . ��� ���������� �����-���� ����� � ���� ��������� � ���������� ������� ������� �� ������������ ������ ��������� ���������, ���� ��������� ����� ����������� ��������� �������������, � ���� ���������� ��������� ����� ����� ���:
����� ������� ���������� ���������--��������� � ��������� ����:
��������� ��� ���������� ���� ������� �����������:
�������, ��� � ����� ������ ������� ��������� ���� ��������� ����� ���� ��������, �.�. , ��� , � ��� ��������� ����� �������� ������� ��������� ���� � ��������������� ��� ���������������� ��������. � ������ ������ ��������� �������� ����������������� ��������� �.�. ���������� � ����� ���������������� ��� ������ ������� ��������� ���� , -����������� �����.
�������� ��������� ���������, ������ ����� � ������ ������ ������� ����� ���� ���������� �� ������������ ��������� , �������� ���������� �� ����, ���� ���������� �� ��������� ������ , �� ������� ������ ����.
��������� ��������� � ������ �������� �������, �� ��� ��� �������� �� ��������� ��������� ����������� �������� �����, � ������� �� ������������ ����������� ��������� �� ��������� � ������� ��������� �������. ��������� ������ ��������� � �������� ���������� ������ ����� ������� �� �������� �����, �� ����� ����� ���������� ���� ���� �������. ��� ����
� ����� ���������� ���� �� ������ ������� ���������, � � ����� ������ ������� ����������, ���� ��� � ����������.
�������� ������ �� ��������, ��� ��� ����������� ������ ���������� ������� ��� ����� �������� ��������� �����������, � ����� � ������ ������ �����������. ��� ���� ���������� ���� �� ������� ����� ������� ��� ����������� � "��� ���������", ������������ �������� ���� ����������� �������� � ������� ������������� �����������. ������������� ����� ������ ������ ����� ��������� ������ ������ �.
�������������� ������� ���������������� ��������� ����� ����� ���:
����� � ���������� ������� �� ���������, � � ���������� ��� ��������,
������ �������� �������� �� �����
����������� �� ���������� ����� ���
������ ����� ��������� ��������� ���������� ������� �� �������� ����� �� ������������ ���������
������� ��� ���� ��������� �� ��������� ������
� ������ ���� ������ ����� �� ���������� ��������� ���������� ������������, �� ����� ���������� ���� �����
���������� �������� ������� � ���������� ���������� ������� ������ �������� �� ��������� ��������.
���������� �������� �������.
����������� ������ ���������� ���������� �� �������.
����������� ������ ���������� ���������� �� �������.
� ������ �� ������������ �������, ��������������� �������� ���������� ������������ ���������� ����� ��������� ���������� ���� ������ ������� ����� ����� � ������� ������:
� ��������������� ���������� �������� �� ��������� ��������.
���������� �������� �������.
����������� ������ ���������� ���������� �� �������.
����������� ������ ���������� ���������� �� �������.
�� �������� �����, ��� ����������, ���������� � ���� ������� ������ ��������� ���� �������, �������� ���������� ��������� ����������� ������������.
��� � ����� �������� (���� ��������, �������, �� ����� �����), � "�������" � "�����������" ������� ���������� ������������ �������, ����������� ������������� ������� ���������� ��������� ������������� �� ������� (��. ����� �.�. ������c����, �.�. ��������� � �.�. ����������), ������ �� ������� ������� �������� � ������.
��������� ���������� ����� �����: ����������� �� GitHub
������������ �����, ��� ��������� ��������� ���� ��� ������� 19 ���, � ��� �������� � �� �����, ����� � C++ �� ���� ��������������� ������, �� ��� � ��������, �.�. ��������. �� ������������� ������� ����� ������������.
������, �.�. ����� �� ����� ���� ��������� ������� ��������� ����������������� �����������, ���������� ����������� ��������, �� ��� ��� ���������� ����, �.�. "�� �������" ������� ���������� ���� �� ���������.
��������� ������� ��������� ��������� �� �������.
[1] ��������� �.�. ������������� �. �. ����������, ����������, ������������ �� �����, �, 1983
[2] ���������� �.�. ������ ���������� ���������: �������� �������, �, �����, 1968
[3] ���������� �.�. �������������� ������ ���������� ����������� ������������� ����������, �, ������������ ����������� ������������, 1990
[4] �.�. ������, �.�. ���������, �.�. ����� ����������� ����������. �������� ������ � ����������, �, 2007
[5] ���������� �.�., ��������� �.�., ���������� �.�. �������� ���������������� ����, �, 2007
[6] ���������� �.�., �������� �.�. ����������� ���������������� ����, �, �����, 1974
[7] �� �.�., ������ �. ������ ������ ������������ ����������, �, �����, 1972
[8] ��������� �.�., ���������� �.�., ����������� �.�., ������� �.�. �������������� ������ ����������� ���������, �, �����, 1969
| �������������� | « ����. ������ — � �������� — ����. ������ » | ��������: [1] [�����] |






