� ���� ����� ������ �� ������������ �
��������� ����������� � ����������. ����� ������� ������ ����������� � �������� � ���������� �����, � ������� ������������
����������� ��������, � � ���, ��� ��� ���������� �� ������������, ���������� �� ��������, ��������.
����� ����� �������� �� ��������� ������:
- ����� 1. �������� � ����������� ��������
- ����� 2. ���������� ������ ����������
- ����� 3. ���������� ������ ����������
- ����� 4. �������� � ����������� �����
- ����� 5. ��������� ���������� ��� ������-������������
- ����� 6. ��������� ���������� �������
- ����� 7. ��������� ���������� ��� �����
����� 1. �������� � ����������� ��������
� ����������� ��� �������� ���������� �������� �����������. ����� �������� ��������� �� ������, �������� ������ ���������� ��������. ��� ��������������� ������� ��� ������������ � ������� ������� ��������. �������� � ���� ������ � ��� ������� ���������
�������. ����� ��������� ����� ��������� ������ ��������, ��������� ������ ��������. ����� ������ ���������� �������� ���������� �������� ���������� ��� ��������� ���. ���������� ������� � ��������� ��������� ��������, � ������� ���� �������� ����� ������������ ���������, ����� ��� ������, ������ � ��������. ������������ �������� ���������� � ������� ���������, ������ � ��� ���� ����������� ������������. � ���� ����������� ��� � ����������
����������� ��������.
������� ����� ����� ����������� � ���, ��� ������� ��������� ��������� ����� ������������ ����������. � ����� �� ����� ����������� ������ ������������� ����������� �������� ������������ ��������� ������. ������� � ����� ��������
���������� ��������� (
Wikipedia). �������� ������ � ��� ����. ����� ����������� � ������� ��� ������������ ��������, �����������
�������� ���������.
���� �� ������� ����� ������������� ������ ���������� ��������, � ������� ����������� ��������� ������ ��� (rigid body simulation). ����� �� ��� ��������� ������ ������������ � ������� �������, �������� � Unity � Unreal. ������� ���������, ��� ���� ������� ������� ������������ � ����� ��� �������� ���������� ��������.
Ragdoll-������
� ����� ������ ���������� �������� ����� ������� ����������� ��������� �������� ����������. ����������� �������� � �����������, ����������� ������������ �����, ����� ������������ � �������� ������������ ���������. ���� �� ����������, �� ����������� �������� �������� ����������� �������� � ����������
������ ��������� ����� (��������, ragdoll)(
Wikipedia). ���� ����������� � �������� ������������ ���� � ���������� ���� ��� ������� ������������ (joints) ��� ����������� �������� �������, ��������������� �������� ����������. ������ ��������� ������ ������ ��� � ����������� ����������, ����� ������������ ������� ���� ��������. ��� �� ������ ��������� ���������� ������ �� ��������� ������. ����� ��� ��������� ��������� ����������, ����������� �������� � ����������������� � �����������. �������� ������ ����� ���������� ������ � ������� ������ �������� ������ ��������, ��� ����������� �� ��� ��������.
��������� ���������� ��������� � �� �������� �����������������, ������� ����� �������� � ����� �������� ����������.
������� �������� ����� �������� � �����. � Unity ���� ������� ����������
Ragdoll Wizard, ����������� ������ ���������� ����������� ������ � �������.
��������� ������� ����
�������� �������� ��������� � ���������� ���������� ����������. ���� ��������� ����� ���� ������������, �� �������� �� ������ �� ������, �� �������. �� ����� ������ ������. ������ ������ ��������, � ������� ����� ������������ ��������� ������.
� ������
How Grow Home Uses Maths To Generate Personality ������� ���������
����� ������� (Alex Wiltshire) ������������� � ��������������� Ubisoft �� ����
Grow Home. ���� �� �������� ������������ ���� � ������ �������� �������� �����, ���� (BUD). � ���� ��� ������� ��������, �� ������� ����, �
������������ ������. ����� ����� ���������, ��������� ��� � ��� ����������� �����. ����� ���� ���������� ��� �� �������������, ��� � � ��������, ��� ���������� �� ��������� ������������ ��������.
�������� ������� ����� ������� ������������ �
Rain World. ������ �������� � ���� ����� ����, ��������� �� ���������� �����������. ��������� �� ��� ����������� �����, ������ �������������� ������������. ��� ����� �������� �� �������� �����. �������� ����� ������� ������ ����� �������� ����������, ��������� ����� ��������� ���������. ���������� ��������� ������� ������������� ������ ������� ��������, ������� ����� ���������� �� �� �������.
� � Grow Home, � � Rain World ����������� �������� ������������ ��� ��������� �������������� ����������. ������ ����������� �� ���������� �� ��� ��������. � ����
Gang Beasts ��� ��������� ������� ��� ������. ���� ��������� �������� ������������ ��������, ����������� � ���������� ������������� ragdoll-������. � ���������� ���������� �������� ��������� � ���������������� ����������.
��������� ����������
��������� ������� ���� ��������� ��������� �������� ��������. �� ���������, ��� ������ ���������� ���� � ���� ����, � �� ��������� ������ �� ��� ���������� ������. ���� ����� ������� ������ �������� � �������� �����������, �� ��� ����� �������� ��������. � ���������� ������� ���� ����������� � ������ ������ ����� ���������, ��� ���������� � �����, �� �� �� ������� ������ ���������. �� ������ ������� ��������� ������� ���-��, ����������� �� ������ ��� ������������ �����������, ������������� ����������� � ������������.
��������� ��� � �������� ����������� �������� �������� ���
��������� ����������. ��� �������� ������ ���� ��������� ���������� ���������, ��� ��� ����� �������, ����� ������� ������ ����. � Grow Home � Rain World ������ ���� ����������, ��� ������ ��������� ������������ ����������� ���������� ����������. ��������� ���������� ���������� �� ��������� � ������ �����.
����� �� ������ ����-���, � ������� ������� �������������� ��� ���������, �����
The Majesty Of Color ������
Future Proof Games. � ��� ����� ��������� ��������� �������� ��������. � ������� �� ����� ����� �� Rain World, ��� �������� �� ������ ����������� ���������. ������ ������� �������������� ����� �������, ����� �������� ����� �������� �������� ������ �����. ���� �� � ���� �������� �������������� ������ ��������� ������� ����, �� �������� �������� �� ����������� � ���� �����, ��� ����� ������.
��������� ���������� ����� ������������ ��� ������� ��������� �����. �������� ����������� � ��� ������������ �������� ����������� ���������� � ����������� ��������. ������ ������������� ������� �������� ��������, ������������ ������ ��������� ����, ������� ������ ������� ����. �� ��������� ������ ��������� ����������, ��������� �������� ������������ ������ �������� ���������� ����. ���� �� �������������� ������ ��������� ������� ����, �� �������� ���� �� ����������, �������� ��, ��� ����� ���� ������ �������������.
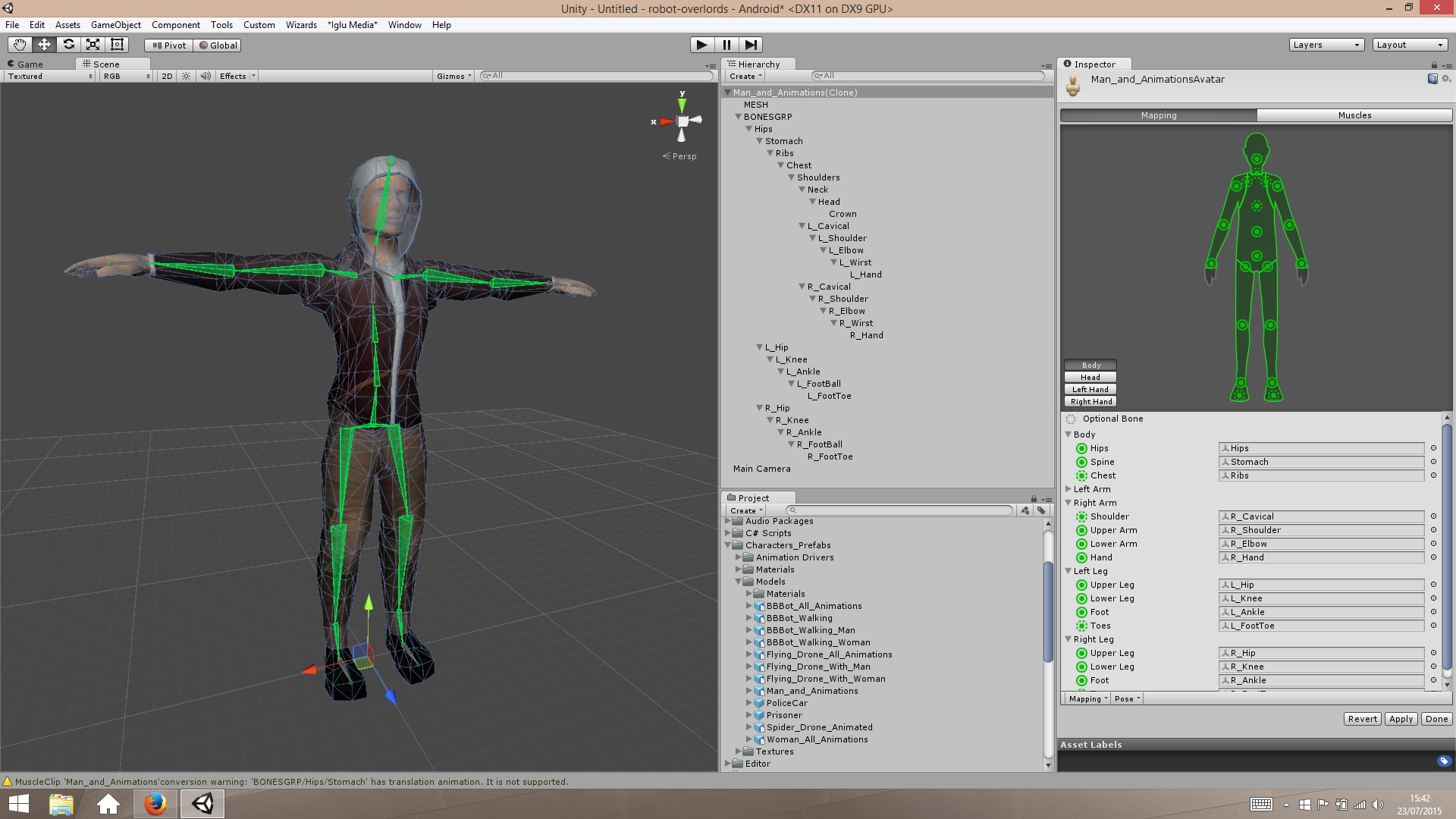
� ��������� �������� Unity ��� ���������
Mechanim ���� ���������� (
������� Unity), ����������� ������������ ������������ ��� ����������� ���������� ��������� ����������.
� ���������� ����� ���� ����� ������ � ������������� �� ������� �������� ��������� ����������. �� ���������, ��� ����� ��������� �������-������������� ��� ��������� �������.
����� 2. ���������� ������ ����������
������ �� ������ ����������� � ���
��������� ����������. ���� ��������� �������� ������� ���� ��������, �� ��� ��� ���������� �
������ ����������.
��������� ���������� ���� ����� � ������������ � �������� ���, ��� ����� ������� �����, ����� ������� �. ������ ���������� ������ ���������������
������������ ������. ����, ��� �� ����� ������� ����, ��� �������� ���, ����� ����� ������������ ��������� ����.
�����-�����������
��������� ���������� ���������� ����������� ��� ����������
��������-��������������. ������� � ���� ����� ������ ����� �������������� ��������� � ������������ �������������. ������ ��� ����� �� ������������ ��������� �������� ���������� ��������� ����������. �� ������ ������������ � ��� ������������ ���, ��� ������ � �������.
��-������, ������� ������ � ������������ ����, ��� �� �������� ��� �������� ������-�����������:
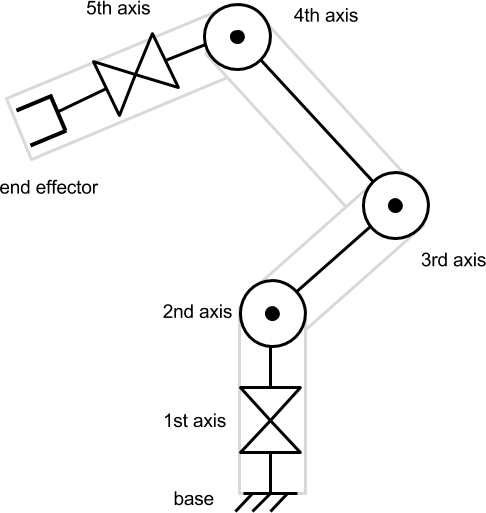
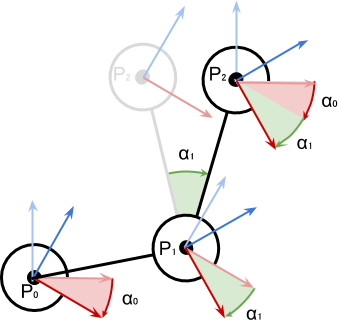
�� ����������� ���� ������� ����������� �����-�����������, ������������� �� �������� (limbs), ����������� ������������� (joints). ��� ��� ���������� �� ����������� ����� ����� ���� ����������� ����������, �� ���������, ��� � ���� ���� ����
�������� �������. ������ ���������� ����������� ����������, ����������� ���������� �������������� � ���������� ����� �� ����������� ����.
����� ����������� ����� ����� ������, �� ����� ��������� ����� ����������. � ���� ������ �� ������, ��� ������ ���������� ����� �������������� ������ �� ����� ���.
����������, ������������ � ����� ������-������������, ����������
�������� ������. � ����������� �� ��������� �� ����� ��������� ��� �� ��������� ����� �������� �������. � ���� ������ �������� ����� �� ����� �����������, ������ ��� �� �������������� ������ �� �������� ��� ���������� ������ �����.
������ ����������
� ���� ������� ������ ���������� ����� �������������� �� ����� ���. ������� ��������� ������� ���������� ���������� ��� ����. ����������� ������ ���������� �� ����������� ����, �� ��������� ��������� ����� ��������� ������ ����� � ������������. ����������� ����, ��� ��������� �������� ����� ��� ��������� ����� ����������, ����������
������ �����������.
������ ���������� � ��� ��������� ��������. ��� ��������, ��� ��� ������� ��������� ����� ���������� ���� ������������ ���������, ������� ����� ��������� ��� ������ ����������������. ����������� ����, ��� �����-����������� ��������� � ����������� �� ������������ ���� ������ � ��� ����������� ��� ��� ���������� �������� �������� ��������� ����������.
�������������� �������������
������ ��� ������ ������ ���, ��� ����� ������ �������������� ����������, ������� �� ������ �����������. �� ������ ����� ��� ����� �����������, ��� ��� ������ ��������������� � �������������.
��������� ��������������� �������� � 3D �� ��� ������, ������� ������ � �������� ������������ � ���������� ������������. �����-����������� ����� ��������� ��������� � ��� ������������, � ������� ��� ���������� �������� �� �� �������� ����.
�� ����� ���� ������� ����������� � ����� ��������� �������. ������ ���������� �������� � ��������� ��� �������� ����, �� ���� ����� ��������� � �������� ���������. �� ����� �������, ��� ���������� ����� ������������ ��� �������� ����������

��

��������. �� �������� � ���������������� ����������� ���� ������� ���������� � �������, ������������ �
.
����� ��������, ��� ���������, ������������ � ������ �����������, ���� �� ���������. ������ ���������� ������ ���� ����� � ��������� ������� ������ ������� ������. �� ����� ���� �������� ��������� ������������ ��� �������� ������� ���������� ��

��������.
���������

���������� ������
, � ��

������������ ��� �
, �
. ������� ��������� �������� (������� � ����� �������) ������������� � ������������ � ������ ��������� ����� ������ ���� ����������, � ������� ��� ������������.
����������
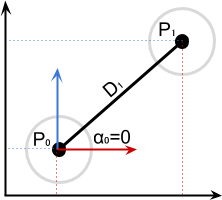
�� ���������� ���� ��������, ��� ��� ������� �������� ������ ���������� ��� ����� ��������� ��������� ��������� (�����������) �������� ��� �� ��������.
������� ���������, ��� ��� ��������� �� ������� ���� ����������. ����� ������� ��� ���� ���������, �� ����� ��������� ���� ������� ��� ������� ����� ����� �����.
������ � �������� ������, ����� ������ ���������� ��������� � ���� ��������� ���������. ��� ������, ���

, ��� �� ����� ����:
��� ������, ���:
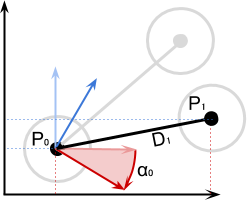
�����
�� ����� ����, ��� ����� ������ ��������� ������ ���������� � ����� �����

������
��
��������:
������������� ��� ����� �������� ���:
���� �� ������, ��� ����� ������������ �������
AngleAxis (
������������ Unity) ��� ����� � ��������������.
������������ �� �� ������, �� ����� �������� ��������� ���
:
�, �������, ����� ���������:
� ��������� ����� ������ �� ������, ��� ��� ���������
������ ����������� � ���� �� C#.
� ��� ������ ������� ��������-�����������?���� �� ��������� ����������� ��������, �� ����� ������ ��� �������� �����. �������� ������ � �������� ���������� ������ ��������, � ��� �� ������� ���������� ��������� ������������������� ��������. ���� �� ��� � �������� � ������� ���������� ������ ����������, ����������
����������� ��������-����������� (
Wikipedia). � ���� ������ �������� � ��������� ������� � ��� ������� �������� ��� �������������� ������� �������� ��������� ����������.
������ � ���� ������ �� �� �� ����������. ������� ������� ��������-����������� ������� ������ ����������, ��� ������ ������������ ������� �����������. ��������� ���� ������ ����������
����������� �����, ������� �������� ����� ����� ���������� �����������.
����� 3. ���������� ������ ����������
� ���� ����� �� ��������� ������ ��������
������ ����������. ����� � ������� ����� �������������� �������, ������ �� ������, ��� ����������� ��� � ���� �� C# ��� Unity. � ��������� �����, ��������� � ����������� �����, �� ������� ������� ������������� ����������� ��� ������� ��������
��������� ����������.
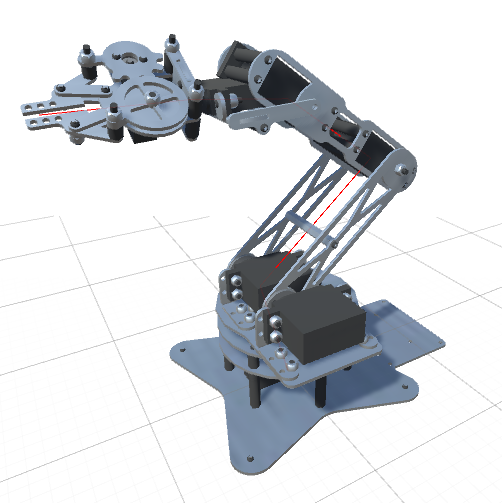
��������
� ���������� ����� �� ��������������� �������� ������-������������. �� ������ � �������� ������� �� ��� ����������. � ����� �������� ���������� ��� ����� ����������� ���� ������������:
������

�� ����� ������������ ����� ��������� ����������, ���

-��� ����������.
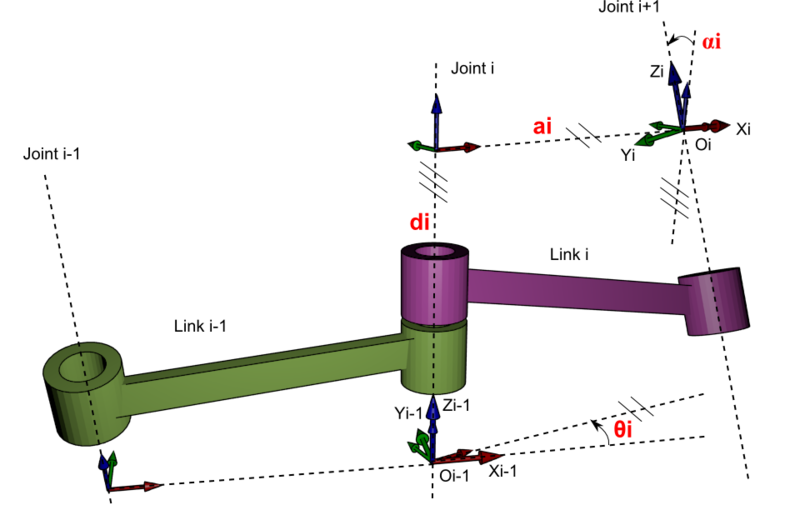
��������� ����, ������������ ������� ������������ �������� ���������, �������� ���

.
��� �������� ���������� �� ��������� ��������� �������:
��������� ���� ������� ����� ����������� ���������� �������������:
- �������. ���������� �������
 ���������� � ��� ����� ��������� ���� ���������� ����������:
���������� � ��� ����� ��������� ���� ���������� ����������:
- ���������. ���������� ��������� ���������� ������� ���:
� ������ ����� ��������������, �� ����� ������ ����������� ��������� ������ ���������� ���� ��������� � Unity.
�������� GameObject
� Unity ��� ���� ������ ���������� ���� �������������� ����������:
������� ������������ ����������� (parenting). ���� ������� ������� ������ �������� �� ��������� � �������, �� ������������� ��������� ���������, ������� � �������.
���� ��� ������ �������, �� ��� ��� �� ������. �����, �������������� ����� ���������� ������������ ���������, ���� ����� ������� ���������, ��� ������� �������� � �������� �����������. �� ����������� ��
Unity Animation 3: Character Setup ������ ��������� ������� ��������� ������ �����.
��� �������� �������� ���������� ���������� ���������, ���, ����� ��� ��������� ���� ������ ����� ����, �� �����-����������� ��������� � �������� ���������. ��� ������������ ��������� ��� ������
����������� T-�������� ����, ���������� �� ����������� ����.
����������
����������� �������� �������� ����������� � Unity
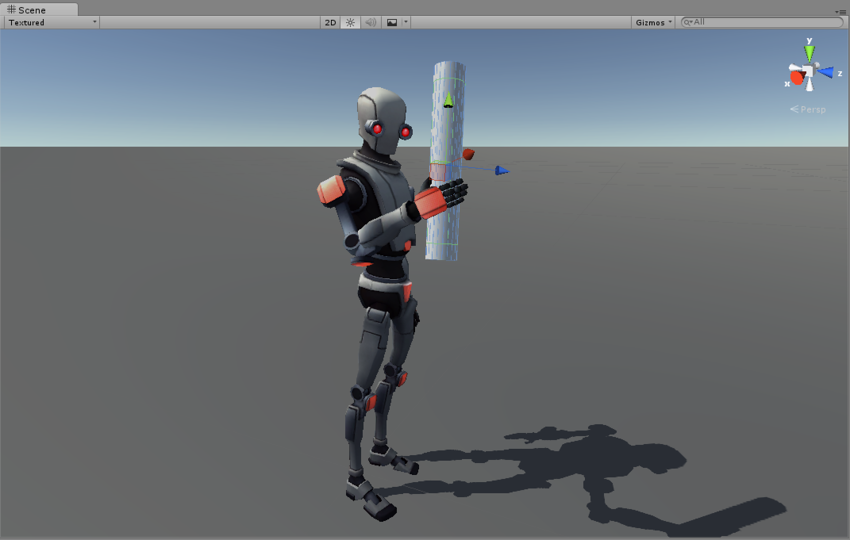
��-����� ������ �������� ������ ����������. � ���������, ����� ������������. � ��������� ����� ����� ������ �� ������, ��� ��� �� ����� ���� ����� ������ �������� ��������� ��������� �����
��� ����������� ������-������������. ��� �������� ��� ��-������ ����������� ��� ������� ������� Unity.
������ ��� � ��� ���������� ���������� � ������ �� ���������� ������-������������. ����� ����� ������� ��� ������ �������, ��������
RobotJoint �� ���������� �������:
using UnityEngine;
public class RobotJoint : MonoBehaviour
{
public Vector3 Axis;
public Vector3 StartOffset;
void Awake ()
{
StartOffset = transform.localPosition;
}
}
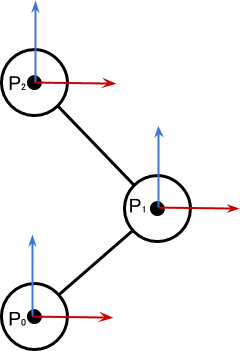
��� ��������� ���������� ������, ��� ������ ���������� ����� �������������� ������ �� ����� ����� ��������� ���: X, Y �� Z. �� ��������� ��� ����������
Axis, ������� ��������� ��������
1 ��� ���������� ������������ ��� ��������. ���� ���������� �������������� �� ��� Y, ��
Axis ����� ����� ���
(0,1,0). �� ������, ��� ��� �������� ��� ���������� �� ����������� �
IF.
������� �������� �������
ForwardKinematics. ��� �������� ������
angles ����� ����
float. ��� ������� ���� �� ����:
angles[i] �������� �������� ���������� �������� i-���� ����������. ������� ���������� ��������� ��������� ����� � ���������� �����������.
public Vector3 ForwardKinematics (float [] angles)
{
...
}
��� �������� ������� ����������� �� C# ����������� ���� ��������� ���������. �������
rotate ����������� ����� ������� �������
Quaternion.AngleAxis.
Vector3 prevPoint = Joints[0].transform.position;
Quaternion rotation = Quaternion.identity;
for (int i = 1; i < Joints.Length; i++)
{
// ��������� ������� ������ ����� ���
rotation *= Quaternion.AngleAxis(angles[i - 1], Joints[i - 1].Axis);
Vector3 nextPoint = prevPoint + rotation * Joints[i].StartOffset;
prevPoint = nextPoint;
}
return prevPoint;
����� ������ � �������������?�������� � Unity ����� ����������� ����� ���� ������. ��� ��� �����, �������������� �������� ������� �� ���� X, Y � Z. ���� ������ ����������
���� (roll),
������ (pitch) �
�������� (yaw) ������� � ������������. ������ � �������������� ����� ������ ������������� ����� ������ ����� �������� � �������� ���������� ���������.
�������� � ������ ������� � �������
������������ (quaternions). ����������� � ��� �������������� �������, ������� ����� ������������ ��� ��������
���������. � ������� �� ���, ���� ������ ���������
����������. ����������� ��������� ����, ������� ����� ������ �� ����� ���������� � ������. � ����������� ����� ������, ��� ������� ������� ���������, �� ��� ����� ������ ��� ����� ��� ����������.
�������� <=> �����������
���������� ����� ����������� ��� �������. �������� ������� � ������������ � ���, � �������������� ����� ������, ������ ��������� ��� ��������� �� ����������. ��� �������� �������� ������ ����������� ����� � Unity ����� ������������ �������
Quaternion.AngleAxis. ������
Quaternion.AngleAxis(angle, axis); ������ ����������, ����������� ������� ������ ���
axis ��
angle ��������. � ���� ��������� ��������
Axis ����� ���� �����
(1,0,0),
(0,1,0) ���
(0,0,1), ��� ����������, ��������������, X, Y ��� Z. ��� ���������, ������ �� ������� ����������
Axis � ������
RobotJoint.
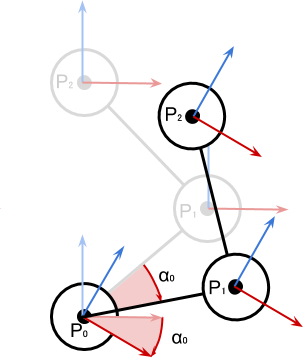
���������� �������� <=> ��������� ������������
��� ��������� ���� ������������ �������� ����� ����������, ���������� � ���� ��� ��������. ��� ������ �������� �����
for ����������
rotation ���������� �� ������� ����������. ��� ������, ��� ��� ����� �������� � ���� ��� �������� ���� ����������.
���������� * ������ = ��������� ������
�������, ����������� ������������ � ���� ������:
Vector3 nextPoint = prevPoint + rotation * Joints[i].StartOffset;
��� ��������� ������������� ��������� ������:
������������ ����������� � ������� ��������� �������.
[��������� �������. �� ������ ������ �� ���������� ��������� ����������.]

https://habrahabr.ru/post/332164/