(По материалам доклада Рязанской государственной радиотехнической академии на VII Международной конференции «Цифровая обработка сигналов и её применение»)
Сокращенный текст 3-го выпуска справочника "Кто есть кто в робототехнике" (фрагмент)
При построении видеокомпьютерных систем сопровождения объектов (ВКСС) актуальной остается задача повышения точности слежения за подвижными объектами при высоких скоростях и ускорениях изменения направления на объект, обусловленных в основном наличием качки носителя следящей системы. Задача сопровождения объектов усложняется возможностью временного пропадания информации об отслеживаемом объекте в результате закрытия его различными фоновыми образованиями.

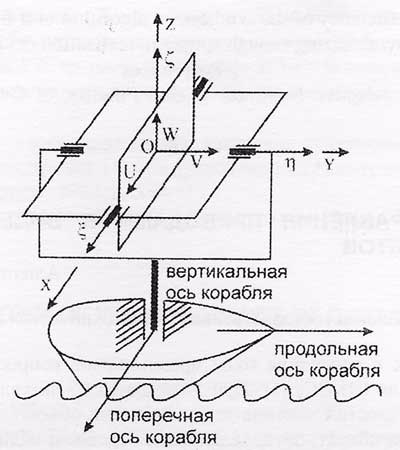
В докладе рассмотрен один из возможных путей прогнозирования управления приводами следящей системы, направленный на увеличение точности прогноза, используемый как при нормальной работе системы, так и при пропадании информации об объекте. Рассмотрим случай, когда платформа с видеодатчиком, закрепленная в двухосном или трехосном карданном подвесе, установлена на подвижном носителе (корабле, летательном аппарате, наземном носителе и т. п.). При отсутствии управления приводами платформы последняя вместе с носителем подвержена угловым колебаниям, определяемым такими понятиями, как крен. тангаж, рыскание, имеющим место при маневрировании носителя платформы, волнении на воде, изменении состояния воздушных потоков, неровности поверхности земли. Вызываемые перечисленными факторами угловые колебания могут иметь составляющие с частотами, доходящими до 1-1,5 Гц. Наличие таких составляющих в угловой траектории направления на отслеживаемый объект практически делает невозможным проведение операции прогнозирования траектории на относительно длительные интервалы времени из-за большой погрешности такого прогноза. Положение усугубляется тем, что, как правило, платформа подвержена высокочастотным вибрациям, требующим применения статистического прогнозирования по достаточно длительным временным отрезкам траектории движения. Будем в дальнейшем считать, что движения в пространстве центров тяжести носителя платформы и отслеживаемого объекта определяют медленно меняющуюся составляющую траектории углового изменения направления на объект, то есть маневрирование носителя и объекта отсутствует. Рассмотрим три системы координат. Оξηζ - неподвижно ориентированная относительно горизонта система координат. Точка О расположена в центре массы носителя платформы с ВД. Оси ориентированы относительно некоторого начального положения носителя, причем плоскость Оξη параллельна плоскости горизонта. ОXYZ - неподвижная система координат относительно носителя с центром в точке О, расположение осей которой определяется расположением в пространстве строительных осей носителя. При отсутствии эволюции носителя система координат ОXYZ совпадает с Оξηζ. Подвижная система координат OUVW с центром в точке О привязана к платформе с ВД, ось ОV совпадает с оптической осью видеодатчика. Информацию об угловых положениях отслеживаемого объекта в системе координат OUVW можно получить путем обработки изображения, формируемого видеодатчиком, на предмет определения отклонения центра объекта на изображении от центра изображения видеодатчика. На основе этой информации формируется управление приводами платформы в системе координат OXYZ . Рассмотрим направление на объект, например, по азимуту φ(t), что не уменьшает общности суждений. В системе координат Оξηζ функция φ(t) обычно имеет вид полинома степени п = 1...2 или тригонометрической функции, например, φ(t) = агсtаn(t). Управление приводами карданного подвеса осуществляется в системе координат OXYZ. При эволюциях носителя направление на объект по азимуту Ψ(t) в системе координат OXYZ, будет отличаться от φ(t) в системе координат Оξηζ. Если причиной эволюции являются вибрации или качка, то направление на объект в системе координат OXYZ будет носить колебательный характер. Такой характер изменения направления на объект уменьшает точность сопровождения объектов ВКСС по сравнению с режимом, когда отсутствуют эволюции носителя платформы с ВД. Одним из возможных способов увеличения точности сопровождения может быть следующий многоэтапный подход. Производится пересчет угловых координат объекта в декартовы координаты системы координат OUVW. Затем путем использования информации от датчиков углов поворота карданного подвеса полученные координаты пересчитываются в систему OXYZ применением линейного преобразования базисных векторов из одной системы координат в другую. На основе информации о параметрах качки носителя производится переход в систему координат Оξηζ. Таким образом, получаемое направление на объект по азимуту будет описываться некоторой функцией φ(t) с наложенной на нее высокочастотной преобразованной вибрационной составляющей. С учетом имеющего место в контуре управления значительного запаздывания τ (величина τ может достигать значения, равного времени между поступлением двух соседних кадров изображений с видеодатчика), обусловленного сложностью применяемых алгоритмов обработки изображений в ВКСС. решается задача статистического прогнозирования получаемой траектории в системе координат Оξηζ на величину τ. Затем полученный спрогнозированный отсчет траектории объекта пересчитывается из системы координат Оξηζ в систему координат носителя OXYZ для расчета требуемых угловых перемещений рамок карданного подвеса, отрабатываемых следящими приводами рамок с использованием информации с датчиком углов поворота этих рамок относительно своих осей. Введение блока прогноза позволяет увеличить точность слежения за объектом. В дополнение к этому возможно увеличение частоты квантования внутри следящего контура в несколько раз по отношению к частоте следования кадров изображений, что позволяет расширить полосу пропускания следящей системы, за счет прогнозирования координат объекта в промежуточные моменты времени. Расширение полосы пропускания следящего контура позволяет увеличить точность воспроизведения задающего воздействия. Как отмечено ранее, в ВКСС по различным причинам возможно пропадание информации о положении объекта на изображении, что требует организации на время пропадания сигнала движения платформы с видеодатчиком по прогнозу. Прогнозирование направления на объект в системе координат Оξηζ осуществляется с большей точностью, так как координаты последовательности единичных векторов, определяющие угловую траекторию объекта свободны от составляющих колебаний, вызванных качкой носителя. Далее процедура вычисления задающих воздействий на следящие приводы карданного подвеса остается по сути такой же, что и описанная ранее. Прогнозирование положения объекта в пространстве возможно и в системе координат OXYZ, однако, при отсутствии информации в течении более чем 1-2 кадра изображения ВД, ошибка прогнозирования становится значительной и не позволяет осуществлять движение по прогнозу с приемлемой точностью. Большая ошибка прогнозирования обусловлена наличием эволюций носителя, определяемых в основном качкой последнего. Как уже отмечалось, траектория объекта может содержать высокочастотную вибрационную составляющую. Вибрация отдельных частей носителя возникает обычно при наличии работающего двигателя (машина, самолет), различных дисбалансах и технического несовершенства в устройствах крепления и подавления вибраций. Вибрации приводят к дополнительным ошибкам в слежении за объектом. Для компенсации подобных внешних воздействий на ВКСС возможно применение сглаживания координат объекта в системе координат OXYZ, однако, это приведет к запаздыванию в слежении за маневрирующим объектом, что недопустимо. Лучшим подходом для компенсации вибраций является рассмотренный выше подход формирования управляющих сигналов, то есть перевод формирования управления приводами карданного подвеса из системы координат OXYZ в Оξηζ. При этом следует учитывать то обстоятельство, что в системе координат OXYZ возможно перекрытие частотных спектров составляющих качки и вибрации, что делает невозможным выполнение операции полного разделения этих двух составляющих, в то время как в системе Оξηζ возможно эффективное уменьшения влияния вибрации в случае, если траектория движения объекта при отсутствии качки и вибраций носит низкочастотный характер, то есть частотный спектр такой траектории объекта практически не пересекается со спектром высокочастотных вибраций.
САМОДВИЖУЩАЯСЯ 155-мм ГАУБИЦА FH-77B разработана в Швеции. Она оснащена двигателем мощностью 59 кВт (80 л. с.), который приводит в действие колеса (скорость 8 км/ч), а также гидравлические приводы механизмов автоматического заряжания, наведения, подъемного крана. Перевод орудия из походного положения в боевое и из боевого в походное автоматизирован.
Снаряды в механизм автоматического заряжания подаются краном одновременно по 3 шт. из поддонов емкостью 12 снарядов каждый. В казенник автоматически досылаются только снаряды, заряды же подаются вручную. Боевая скорострельность гаубицы составляет 6 выстрелов в минуту.
В случае выхода из строя двигателя или для обеспечения звукомаскировки гидравлические системы орудия имеют два ручных привода. С помощью одного из них приводятся в действие механизмы наведения и автоматического заряжания, а с помощью другого осуществляется перевод орудия из походного положения в боевое и обратно.
Наведение гаубицы осуществляется автоматически. На накатнике орудия находится прибор для определения начальной скорости снаряда.
В боекомплект орудия планируется включить управляемые артиллерийские снаряды, кассетные снаряды с противотанковыми минами, предназначенные для скоростного дистанционного минирования местности на танкоопасных направлениях, а также кассетные боеприпасы, снаряженные кумулятивными поражающими элементами.
Повышение точности и кучности огня гаубицы обеспечивается широкой автоматизацией всех процессов подготовки исходных данных и управления огнем. Журнал "Техника и вооружение" времён СССР
Серия сообщений "Автоматизация":Внедрение автоматических систем
Часть 1 - Автоматизация конструирования радиоаппаратуры
Часть 2 - Супермаркет без кассира: умнее, чем кажется на первый взгляд
...
Часть 16 - Ультразвуковой дальномер
Часть 17 - Радиолокационный дальномер К-диапазона
Часть 18 - Прогнозирование управления приводами в видеокомпьютерной системе сопровождения объектов
Часть 19 - Разработка алгоритмов управления для ПЛК в Simulink
Часть 20 - Оборудование и технологические процессы в легкой промышленности
...
Часть 40 - Умный дом сам отремонтирует бытовую технику: телевизор, микроволновку, чайник, смартфон
Часть 41 - Автоматизация в розничной торговле
Часть 42 - Техногенная мусоропроводная катастрофа?








