На выставке маломерного флота представлена новейшая электроника, облегчающая, посредством роботизации, судовождение. Учитывая, что в нашей стране возрождается судомоделизм, а также то, что среди моделистов вообще есть тяга к воспроизведению моделей большого размера со всеми функциями прототипов, мы расскажем о некоторых устройствах, которые можно адаптировать для моделизма.
На рис. 1 - две схемы из каталога фирмы "Микстмарин". Это типовые схемы построения навигационных систем на основе оборудования компании Raymarine. Видно, что схемы отличаются друг от друга, и, если мы договорились, что данное оборудование модно адаптировать для построения большой модели-копии, то для копии определяющую роль будет играть та часть оборудования, которая будет частью антуража. В данном случае - радарная антенна. На левой части схемы антенна открытого типа, на правой - антенна в обтекателе закрытого типа. Выберем из каталога две наименее громоздкие антенны. Это:
- M92650-S, антенна в обтекателе закрытого типа, диаметр 18 дюймов, горизонтальный луч 5,2 град., вертикальный луч 25 град., дальность 24 мили, питание 12/24 В, потребляемая мощность 24 Вт;
- T52001, антенна открытого типа, длина 48 дюймов, горизонтальный луч 1,85 град., вертикальный луч 26 град., дальность 72 мили, питание 12/24/32 В, потребляемая мощность 46 Вт.
Следующая существенная деталь. Эти схемы - для пилотируемых судов, капитаны которых видят показания датчиков на дисплеях, нанесённых на данные схемы. Наши объекты - беспилотные судомодели, которых с подобным оборудованием уже можно причислять к роботам - и, очевидно, частично автономным, частично телеуправляемым. То есть, дисплеи должны быть установлены не на борту, а на отдалённом пульте управления, данные на который должны передаваться по радиоканалу. Либо, если степень автономности повышенная, данные должны поступать на бортовой компьютер, который сам будет управлять плавсредством. И в том и в другом случае здесь открывается простор для конструирования, а о необходимых для этого технологиях мы рассказываем на страницах "РЛ".
Но и в "штатном" режиме пилотируемые плавсредства стали комплектоваться техникой дистанционного управления. Так, устройство Smart Controller, внешне напоминающее мобильный телефон, предназначено для дистанционного управления яхтой. Оно подключается к любой системе автопилота Raymarine и использует радиоканал для передачи информации на пульт о скорости, глубине, курсе и других параметрах движения яхты. Компактный пульт с дисплеем, на котором отображается текущая информация удобно крепится на поясе или с помощью ремешка на шее. С этого же пульта можно изменить курс яхты.
Возможность дублирования данных на удалённые посты предусмотрена в бортовом устройстве, конфигурация которого включает Е120 радар, GPS картплоттер, дисплей эхолота. Устройство обладает функцией наложения данных радара на карту и имеет цифровой модуль эхолота. Для эхолотов, в зависимости от их типа, разработаны разнообразные датчики. Например, работа бронзового датчика глубины, скорости и температуры (сквозь корпус) основана на двух лучах 15/45 град. (200/50 кГц) при рабочей мощности 600 Вт.
Есть новинка - комплект беспроводного автопилота для катеров с гидравлическим приводом рулевой системы длиной до 7,5 м. Среди его режимов: перекладка руля, изменение курса, навигация по путевым точкам, используемые при рыбной ловле заложенные траектории. В комплект входят: беспроводной дистанционный пульт управления автопилотом, курсовой компьютер, гидравлический насос. Применён интерфейс SeaTalk/NMEA.
О компьютерном оснащении этих навигационных систем. В комплектацию серии Smart Pilot входят: курсовой компьютер, индукционный датчик, датчик угла поворота руля. Кроме того, предусмотрена комплектация высокоточным датчиком определения курса MARPA и встроенным датчиком Rate Gyro.
С учетом особенностей управления маломерным флотом автопилоты подразделяются на штурвальные (верхняя часть рис. 2) и румпельные (нижняя часть рис. 2). Все они имеют питание 12 В и выполняют такие функции, как управление по заданному курсу, навигация по путевым точкам, управление по курсу относительно кажущегося ветра. Изображенные на рис. 2 румпельные автопилоты ST1000/2000 имеют, соответственно, тяговое усилие 57/77 кг, а вращательный момент штурвальных составляет 30 Нм.
На рис. 3 - пример штурвального автопилота: авторулевая система для парусных судов с открытым ременным приводом. Существует также штурвальный автопилот для катеров с механическим (тросовым) приводом рулевой системы. Соответственно, разработан большой ассортимент аксессуаров для крепления автопилотов на судне - от кронштейнов, ремней привода и муфт сцепления до датчиков угла поворота руля и ограничителей вращающего момента.
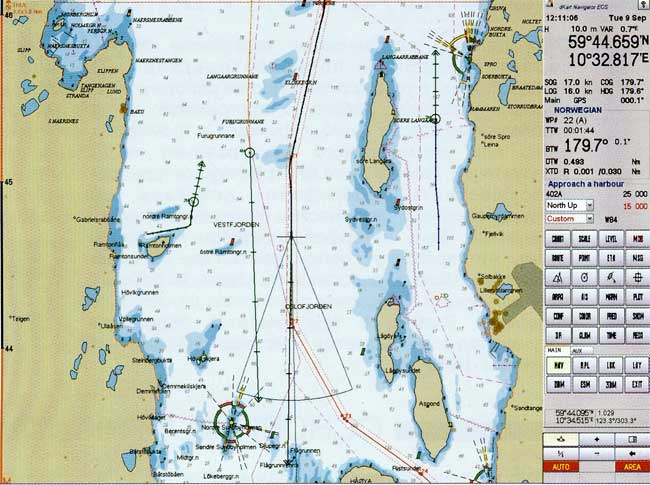
На рис. 4 - пример навигационного программного обеспечения. Это dKart Navigator (фирма "Джей Джей Рэйсинг"). Среди её функций - автоматическое ведение прокладки маршрута на электронной карте, автоматическая сигнализация, выполнение предварительной прокладки маршрута, запись данных в электронный судовой журнал, решение вспомогательных штурманских задач. Программа используется для работы с данными, поступающими от радара. При работе с радарами предусмотрены две возможности: получение информации о целях от ARPA по NMEA протоколу и отображение "сырой" радарной картинки поверх электронной карты. При этом символы и векторы скоростей целей отображаются на электронной карте с одновременным представлением их формуляров.
В описаниях электронных систем морского и речного применения часто встречаются специфические термины и аббревиатуры. Приведём некоторые из них по каталогу "Микстмарин".
SeaTalk - шина передачи данных между любым количеством SeaTalk-совместимых приборов, предназначенная для обеспечения их функционирования как единой, интегрированной системы навигационных инструментов.
SeaTalk2 - высокоскоростная шина передачи данных, обеспечивающая скорость передачи данных более чем в 20 раз быстрее стандартных шин.
SeaTalkHS - высокоскоростная шина передачи видео информации, данных радара, картплоттера и эхолота между устройствами, подключенными к сети SeaTalkHS, с возможностью удалённого управления этими устройствами.
NMEA (National Marine Electronics Assotiation) - общее название международного протокола передачи данных в двоичном формате.
MARPA (Mini Automatic Radar Plotting Aid) - система автоматической радиолокационной прокладки; с её помощью осуществляется определение элементов движения встречных судов и оценка ситуации сближения, необходимые для решения задач по предотвращению столкновений.
HDFI (High Definition Fish Imaging) - технология детального отображения объектов (рыб) в толще воды с высоким разрешением, основанная на цифровой обработке данных.
CFR 46 - стандарт водонепроницаемости, соответствующий способности выдерживать воздействие воды, направленной через сопло диаметром 1 дюйм, с расстояния 3 м, со скоростью 246 литров в минуту, в течение не менее 5 мин.
IPX7 - стандарт водонепроницаемости, соответствующий способности выдерживать воздействие воды без потери работоспособности при погружении на глубину 1 м в течение не менее 30 мин.
При изучении морской робототехники может сложиться впечатление, что её разрабатывают только зарубежные фирмы. Однако, это не так. В ходе осмотра другой экспозиции (в том же выставочном комплексе) нам встретилась разработка федерального научно-производственного центра ФГУП "ЦНИИ автоматики и гидравлики": комплект электромеханических следящих приводов интерцепторов для быстроходных катеров. Его предназначение - автоматическое перемещение интерцепторов по сигналам системы управления в целях стабилизации положения катера при волнении моря до 5 баллов и увеличения скорости хода до 50 узлов. В состав комплекта входят: электромеханический исполнительный механизм (8 шт.), блок управления (4 шт.), блок питания. Максимальное перемещение выходного штока исполнительного - 50 мм. Максимальная скорость перемещения выходного штока - 100 мм/c. Максимальное усилие на выходном штоке - 6000 Н. Частота изменения управляющего сигнала - до 2 Гц. А. Барсуков для журнала "Радиолюбитель"
Перспективы применений продольных электромагнитных волн (ЭМВ) и электродинамическая природа движителя дельфина. Изучение продольных электромагнитных волн (ЭМВ) из стадии эволюционного развития вступило в фазу революционного скачка, т.е. быстрого увеличения числа работ и их тематики, причем существенные отличия характеристик продольных ЭМВ от поперечных и экспериментально доказанные их существенные преимущества в ряде областей науки и техники обеспечивает широкое применение продольных ЭМВ в новейших технологиях от медицины и сельского хозяйства до строительной индустрии и военных разработок.
Продольные ЭМВ имеют хорошие перспективы на применение, например, при проведении бетонных работ, при сушке и пропитке древесины, при обеззараживании поверхностей, помещений, продуктов и воды, в пищевой и биологической промышленности, в устройствах интроскопии, в том числе и металлических изделий, в устройствах связи и локации, в том числе подземной и подводной и, конечно, в военной сфере (многочисленные разработки США на основе продольных ЭМВ, например, система НААRР). Примеры применения продольных ЭМВ в военной технике и технологии:
- скрытное воздействие на персонал в произвольный момент времени на коротких (1-20 м), средних (1-10 км), и дальних дистанциях (до 100-300 км) посредством излучателей продольных ЭМВ различных конструкций и модификаций с целью вывода его из активного состояния на заданный промежуток времени или с летальным исходом;
- разработка аппаратуры для определения факта скрытного воздействия на персонал в произвольный момент времени при его облучении потоками продольных ЭМВ и средств индикации и защиты персонала от такого нападения;
- разработка аппаратуры для определения скрытного проникновения подводных пловцов и других плавсредств в охраняемую зону кораблей и акваторий и средств для их нейтрализации посредством аппаратуры на основе продольных ЭМВ;
- разработка аппаратуры для направленной и скрытой связи между пловцами, подводными и надводными объектами с использованием излучателей и приемников продольных ЭМВ в окнах прозрачности для воды или их комбинации с лазерами и стандартной аппаратуры на основе поперечных ЭМВ;
- разработка аппаратуры для подводного телевидения с использованием генераторов и приемников продольных ЭМВ ДМВ диапазона для видеокамер и беспроводных линий передачи цифровых данных и изображений на заданное расстояние с использованием продольных ЭМВ;
- разведка и доразведка бункеров, складов и мин и их санкционированный подрыв с использованием новых технологий продольных ЭМВ;
- разработка аппаратуры для дистанционной диагностики летным персоналом неопознанных летающих объектов типа холодно плазменных образований, плазмоидов или торнадо, представляющих повышенную опасность для летательных объектов и для персонала при контакте с ними, с использованием новых технологий продольных ЭМВ;
- разработка аппаратуры для дистанционного подрыва мин, поясов шахидов и других вооружений террористов, а также торпед, снарядов, крылатых ракет и др. при использовании объектов продольных ЭМВ типа плазмоидов или торнадо продольных ЭМВ повышенной энергии при наведении их на объект со скоростью света по лазерному или СВЧ лучу;
- разработка аппаратуры для дистанционного вывода из строя электронной аппаратуры беспилотных летательных средств и их ЖК индикаторов, остановка двигателей наземного транспорта путём воздействия продольных ЭВМ на систему зажигания.
Рассмотрим электродинамический механизм перемещения дельфина в воде. Хорошо известны факты элегантного перемещения дельфинов в воде, при этом дельфин может без заметных усилий развивать скорость до 100 км/ч, выпрыгивать из воды на несколько метров или нырять на глубину до 1 км не испытывая видимых затруднений и усилий.
О механизме такой универсальности мало что известно, однако в последнее время в связи с изучением продольных ЭМВ многие детали механизма перемещения дельфина в воде стали проясняться, и оказалось, что он весьма прост и универсален.
Давно было известно, что при своем движении дельфин издает высокочастотные звуковые импульсы, однако в механизме перемещения дельфина их роль была не определена. Энергия звукового импульса была на несколько порядков меньше требуемой для перемещения в воде механической энергии, а винта как у подводной лодки у дельфина, как известно, нет. При изучении физических явлений, сопровождающих распространение продольных ЭМВ в воде, выяснилось, что при облучении сосуда с водой продольной ЭМВ наблюдаются такие эффекты как шнурование потока продольных ЭМВ, когда при определенной входной мощности продольной ЭМВ распределенный в пространстве поток сжимается к его центру, как у хорошо известного явления продольной ЭМВ – молнии. При этом потери на распространение продольных ЭМВ в воде снижаются на порядок.
При прохождении такого потока продольных ЭМВ в воде, она становится «намагниченной» и ее кристаллическая структура существенно изменяется на некоторое время порядка 5-10 минут, при этом существенно изменяются характеристики и параметры воды, например ее потери на резонансных частотах и вязкость существенно (на 3-5 дБ) уменьшаются.
При облучении сосуда с водой потоком продольных ЭМВ в воде возбуждается продольное электрическое поле высокой интенсивности, а на внешней границе "вода-воздух" появляются избыточные заряды и ЭДС высокого напряжения. При этом величина ЭДС существенно зависит от частоты и мощности излучения продольной ЭМВ и от размеров сосуда. Напряжение ЭДС имеет максимум, когда высота слоя воды от излучателя до верхней границы близка к четверти длины волны продольной ЭМВ в воде.
АЧХ для продольного электрического поля в сосуде с водой носит явно выраженный резонансный характер, а зависимость величины продольного поля от мощности имеет квадратичную зависимость, что коренным образом отличается для зависимости поля Е от мощности для поперечных ЭМВ, где величина поля функционально зависит как корень из мощности.
Кроме того при формировании в сосуде с водой мод. типа циклона Е011 и типа торнадо Е012 можно было наблюдать явления перемещения металлических частиц взвеси в воде или мелких древесных и других частиц. Эти явления свидетельствуют о появлении избыточных зарядов на частицах, граничащих с водой, под действием продольной ЭМВ.
В опытах с цветами, размещенных в сосуде с водой, при облучении сосуда продольной ЭМВ было также отмечено появление в стебле цветка типа розы продольного электрического поля, причем поле имеет максимум на частоте, где длина стержня цветка близка к четверти длины волны. Поскольку цветок является для продольной ЭМВ нагрузкой типа холостого хода, то на его вершине скапливается повышенный заряд и напряжение может превышать 1 кВ, при этом с вершины цветка излучаются порции зарядов с частотой альфа-ритма порядка 5-10 Гц, а в сосуде с водой с той же частотой детектор фиксирует появление колебаний поля продольной волны.
В опытах с ЖК индикаторами при их облучении полем продольной ЭМВ на электродах ЖК индикатора появляется локальное напряжение в месте облучения ПЭВ, причем интегральная чувствительность элементов на резонансных частотах может достигать 1мВ/мВт.
Естественно, величина продольного электрического поля прямо связана с площадью излучателя продольных ЭМВ. Доложенные эксперименты проясняют простой полевой механизм перемещения дельфина в воде, при котором дельфин посредством своей сердечно-сосудистой системы генерирует поле продольной ЭМВ перед собой в виде импульсов, при этом дельфин излучает перед собой в воду порции зарядов электронов, сам временно заряжаясь положительно. Между этими порциями зарядов, отрицательной в воде и положительной в теле дельфина, возникают динамические кулоновские силы притяжения и тело дельфина перемещается в воде в сторону порции отрицательных зарядов, упруго расположенных на водных кластерах. Далее при перемещении вперед заряд тела дельфина нейтрализуется поступившими из воды электронами, а звуковые импульсы непосредственно связаны с преобразованием импульсов продольных ЭМВ в акустические.
Имея данные доложенных экспериментов и принимая для дельфина следующие параметры: вес - 100 кг, диаметр тела - 40 см, диаметр излучателя продольной ЭМВ порядка 4 см, мощность излучателя продольной ЭМВ порядка 10 и 100 Вт для разных режимов движения дельфина, можно просчитать по теореме Остроградского-Гаусса величины зарядов и кулоновской силы притяжения для разных режимов перемещения дельфина Fz = Ez·åQ. Упрощенные расчетные данные приведены в таблице (здесь не приводится). Из данных для упрощенных расчетов таблицы следует, что предложенный электродинамический механизм перемещения дельфина в воде при генерации его телом импульсов продольных ЭМВ вполне может быть реализован для реальных размеров дельфина и его реальной мощности сердечно-сосудистой системы. Практически мгновенную остановку тела дельфина в воде возможно осуществить реверсом направления магнитного вихря. Слышимые звуковые импульсы при перемещении дельфина в воде есть результат преобразования импульсов продольной ЭМВ в продольные акустические волны. По докладу Ермолаева Ю. М. на XIV Всероссийской научно-технической конференции «Современное телевидение»
Серия сообщений "Беспилотные суда и судомодели":Ship modeling and ship models
Часть 1 - Современные технологии - судомоделистам.
Часть 2 - Лодка на солнечных батареях
Часть 3 - Беспилотное надводное транспортное средство SeaStar
...
Часть 7 - Подводных роботов может понадобиться очень много
Часть 8 - Подводный робот-краб: способен ли он повредить трубопроводы и трансатлантический кабель?
Часть 9 - Поддержат ли человекоподобные роботы-компаньоны людей с инвалидностью? Часть 24-я










