Ориентация мобильного робота, выбор способа регистрации особых точек изображений
|
|
Вторник, 05 Сентября 2017 г. 21:37
+ в цитатник
Это предыстория и продолжение статьи:
Дело было вечером...,
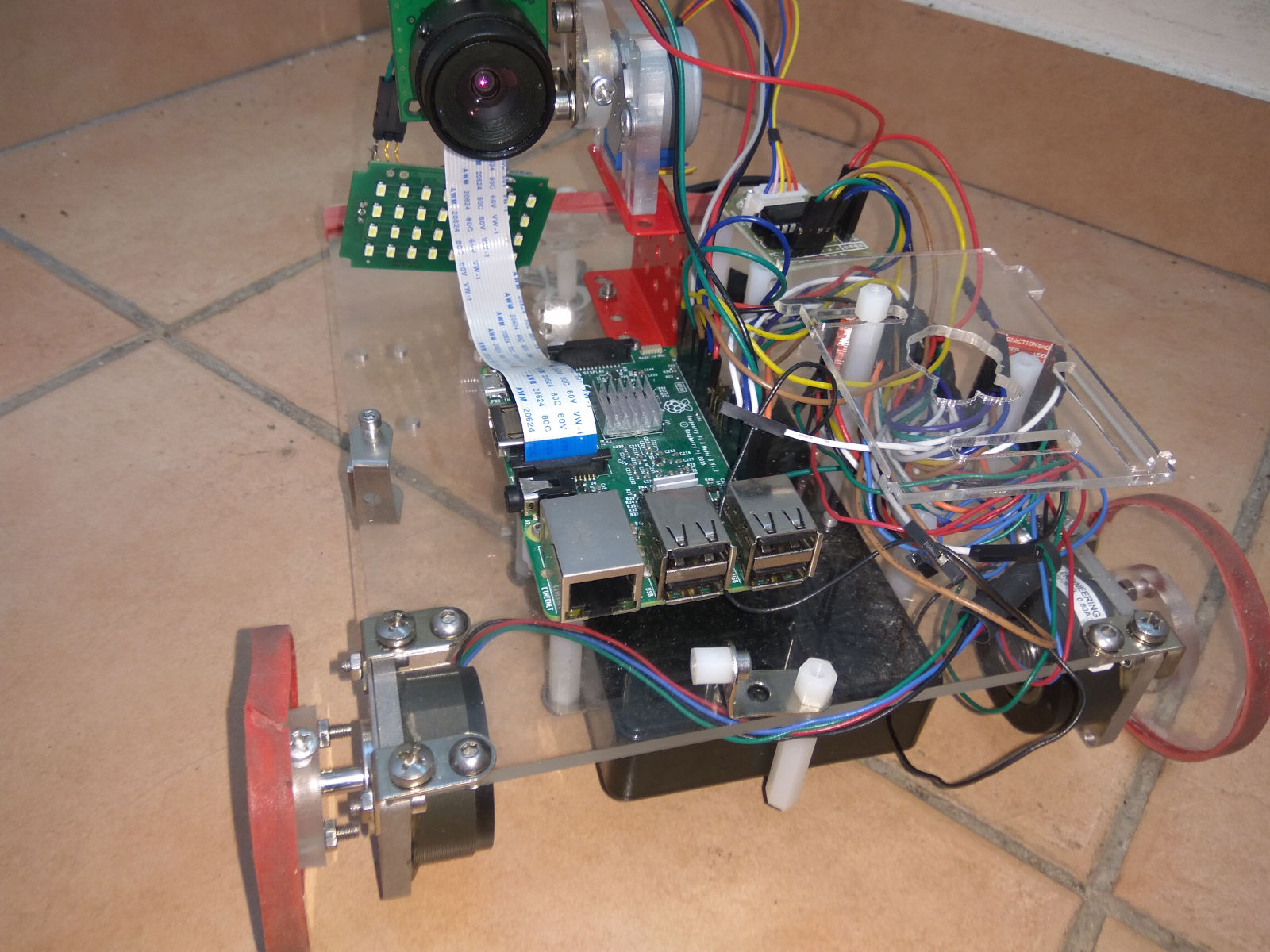
все статьи на хабре были прочитаны, затеял «небольшой» проект по автономной ориентации робота на RaspberryPi 3. С железом проблем нет, собирается недорого из
г-на и палок купленных на ебау деталек, камера с хорошей стеклянной оптикой(это важно для стабильности калибраций), привод камеры вверх, вниз и компас, гироскоп и тд прикрепленные к камере:
Существующие системы SLAM не устраивают, или по цене, или по качеству/скорости. Поскольку наработок деталей для Visual SLAM у меня много, решил шаг за шагом писать и выкладывать алгоритмы и код в открытый доступ, с обоснованием причин выбора тех или иных алгоритмов.
У Вас есть план?
https://habrahabr.ru/post/337214/
Метки:
author Sdima1357
разработка робототехники
обработка изображений
алгоритмы
open source
raspberry pi
видео регистрация
-
Запись понравилась
-
0
Процитировали
-
0
Сохранили
-






