������, ����! ������� ����� ���� ���������� � ����������� ��������� �������� (Deep Learning) �� Google ��� ��������� TensorFlow. � ���������� � �������� ������������ �������� ����� ��������������� ��������. ������� ����� �������� �� ��������� ��������� ����������� ���������� ������ ����������. � ������ ������� ��� �� ���� ������������ ����� ��������������� �������� � �������� �� ��������. � ����� �������� ������ �� ���������� � ��� �� ����� ����� �����.
� ������ ���������������
��� ������ ���������� ��� �� ���� ������������ ����� ��������������� (Self-orginizing Map), ��� ������ SOM. SOM � ��� ������������� ��������� ���� ���������� �� �������� ��� �������. � ������ ��������������� ������� �������� � ����� �������, ������ ����- ��� ���������. ��� ������� ���� ������� ������� �� ����� ������ �������� ����.
SOM ����������� ����������� �������� ������������
� ���������� �������� ������������
.
�������� �������� SOM
�������� ���� ������� �� ���� �������� ���������:
�����������,
���������� �
���������. ���� ������� ��� ���� ��������� �������� SOM.
��� 1: �������������. ��� ���� �������� ������������� �����,
���
� ����� ���������� ��������,
� ����������� �������� ������������, ���������� ��������� �������� �� -1 �� 1.
��� 2: ����������. �������� ������
�� �������� ������������.
��� 3: ����� ����������� ������� ��� ������� �����������. ������� �������� ���������� (���������� ������)
�� ����
, ��������� �������� �������� ��������� ���������� (��� ������������ ��������� ��������� ������������
):
��������� ����������.��������� ���������� (
) ����������� ���:
��� 4: ������� ����������. ������-���������� ��������� � ������ �������������� ����������� ���������������� ��������. �������� ������:
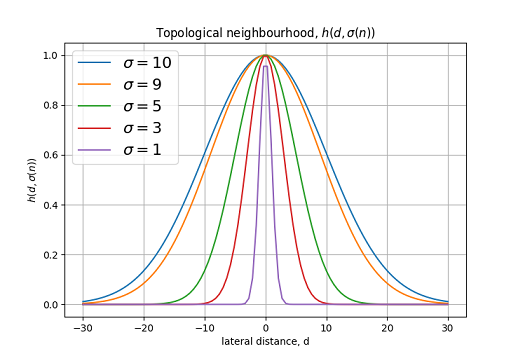
��� ���������� ��� ���������� �������������� ����������� (topological neighbourhood) ����������� �������? ��� �������� ��������� �� ��������:
, � ������� � ���������� �������
. �������������� ����������� ������ ���� ������������ ������������ ����� ���������, ������������ ���
,
� ��� ����������� ���������� (lateral distance) ����� ����������
� ��������� ���������
.
�������� ��������, ��������������� ������� ����,
��������
������� ������:
���
� ����������� ������ (effective width). ����������� ���������� ������������ ���:
� ����������, �:
� ��������� ������. ���
���������� ������� ������������� �������, �
� ������� ����������� ������� (� ������ ��������� �������
, ���
�
���������� ������� � �������).
������ ������� �������������� ����������� ��� ��������� .
��� SOM ���������� ���������� �������������� ����������� � �������� ��������. ������� ����� ����� �������
�� �������:
���
� ��������� ���������,
� ��� ��������,
� ��������� ��������
.
������ ���������� � �������� ��������.
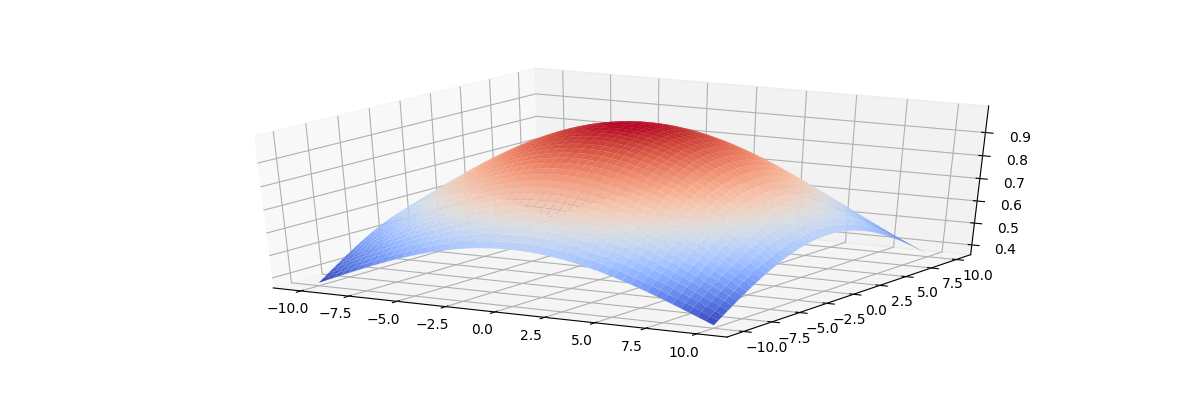
�������
�� ��������� ����� �������� ������ ���������� ������ ��������� �������. �� �������� ���� ��������� ������� ������� �������������� ����������� ��� ��������� �������.
�� ������� ������� �����, ��� � ������ �������� �������������� ����������� ���������� ����������� ��� �������.
� ����� �������� �������� �� ��������� �������.
��� 5: ������� ���������. ������� ��������� �������� � ���� ��������� ������������� ����� ����. ��������� ������� ����� �������
� ������� ����� �������� ��������� �������:
� �������� �������� ��������.
� ����� ����� ������� ������������ ������� ����� � ������ �������
:
� ��������� �������� SOM ����� ������������� �������� �������� �������� ��������
� ����������� �� ����.
���
� ��� ���� ��������� ��������� SOM.
������ ���������� � �������� ��������.
����� ���������� ����� ������������ � ���� 2 � ��� �����.
��������� ��������� �������� SOM
�������� ���� ������� �� ���� ������:
���� ��������������� � ����� ������ �� 1000 ������� � ����� � ������.
���� ���������� � ��������� ��� ������ ���������� ����� ���������. ��� �������, ���������� ��������, ����������� ��� ����� ���������� ����� ��������� ���������� ��������� � ���� � 500 ���.
��������� 1. ��������� �������� ��������� �������� �������� ����� ������� ������� � ��������:
,
. ��� ���� ��� �� ������ ���������� ���� �������� 0.01.
��������� 2. �������� ��������
������� ���������� �������� ������ ������� �������, � ���������
�������� ���:
�� ����� ���������� ������� ���������� ���������
.
���������� SOM � ������� Python � TensorFlow
������ �������� �� ������ � ������������ ���������� ������������������ ����� (SOM) � ������� Python � TensorFlow.
��� ������ �������� ����� SOMNetwork � �������� �������� TensorFlow ��� ������������� ���� ��������:
import numpy as np
import tensorflow as tf
class SOMNetwork():
def __init__(self, input_dim, dim=10, sigma=None, learning_rate=0.1, tay2=1000, dtype=tf.float32):
#���� ����� �� ���������� ������������� �� ������ �������� ������� �������
if not sigma:
sigma = dim / 2
self.dtype = dtype
#���������� ��������� �������������� ��� ��������
self.dim = tf.constant(dim, dtype=tf.int64)
self.learning_rate = tf.constant(learning_rate, dtype=dtype, name='learning_rate')
self.sigma = tf.constant(sigma, dtype=dtype, name='sigma')
#��� 1 (������� 6)
self.tay1 = tf.constant(1000/np.log(sigma), dtype=dtype, name='tay1')
#����������� �������� ����� �� ���� 1000 (���������� �� ������� 3)
self.minsigma = tf.constant(sigma * np.exp(-1000/(1000/np.log(sigma))), dtype=dtype, name='min_sigma')
self.tay2 = tf.constant(tay2, dtype=dtype, name='tay2')
#input vector
self.x = tf.placeholder(shape=[input_dim], dtype=dtype, name='input')
#iteration number
self.n = tf.placeholder(dtype=dtype, name='iteration')
#������� ������������� �����
self.w = tf.Variable(tf.random_uniform([dim*dim, input_dim], minval=-1, maxval=1, dtype=dtype),
dtype=dtype, name='weights')
#������� ������� ���� ��������, ��� ����������� ������������ ����������
self.positions = tf.where(tf.fill([dim, dim], True))
����� �������� ������� ��� �������� �������� �������� �����������:
def __competition(self, info=''):
with tf.name_scope(info+'competition') as scope:
#��������� ������� ��������� ���������� ��� ���� ����� ��������
distance = tf.sqrt(tf.reduce_sum(tf.square(self.x - self.w), axis=1))
#���������� ������ ����������� ������� (������� 1)
return tf.argmin(distance, axis=0)
��� �������� ������� �������� �������� �������� ��� ��������� ���������� � ���������:
def training_op(self):
#���������� ������ ����������� �������
win_index = self.__competition('train_')
with tf.name_scope('cooperation') as scope:
#��������� ����������� ���������� d
#��� ����� ��������� ������ ����������� ������� �� 1d ���������� � 2d ����������
coop_dist = tf.sqrt(tf.reduce_sum(tf.square(tf.cast(self.positions -
[win_index//self.dim, win_index-win_index//self.dim*self.dim],
dtype=self.dtype)), axis=1))
#������������ ����� (��������� ������� 3)
sigma = tf.cond(self.n > 1000, lambda: self.minsigma, lambda: self.sigma * tf.exp(-self.n/self.tay1))
#��������� �������������� ����������� (������� 2)
tnh = tf.exp(-tf.square(coop_dist) / (2 * tf.square(sigma)))
with tf.name_scope('adaptation') as scope:
#��������� �������� �������� �������� (������� 5)
lr = self.learning_rate * tf.exp(-self.n/self.tay2)
minlr = tf.constant(0.01, dtype=self.dtype, name='min_learning_rate')
lr = tf.cond(lr <= minlr, lambda: minlr, lambda: lr)
#��������� ������ ����� � ��������� ��� ������� ����� (������� 4)
delta = tf.transpose(lr * tnh * tf.transpose(self.x - self.w))
training_op = tf.assign(self.w, self.w + delta)
return training_op
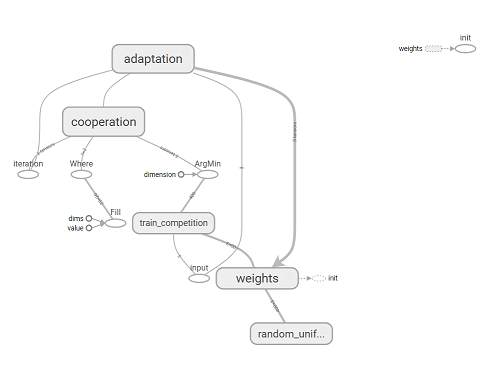
� ����� �� ����������� SOM � �������� �������� training_op � ������� ������� ����� ������� ���� ��������� ����, ��������� �� ������ �������� ������� ������ � ����� ���� ��� ��������. ���� �������� ���� �������� TensorFlow ����������� � ������� Tesnorboard.
���� �������� TensorFlow.
������������ ������ ���������
��� ������������ ������ ���������, ����� �������� �� ���� ���������� ������
. ������ ������ ����� ����������� ��� ���� �� ����
���������.
�������� ��������� ����� SOM ���� � ������ �� ��������� �������� (������):
#���� �������� 20�20 ��������
som = SOMNetwork(input_dim=3, dim=20, dtype=tf.float64, sigma=3)
test_data = np.random.uniform(0, 1, (250000, 3))
������ ����� ����������� �������� ���� ��������:
training_op = som.training_op()
init = tf.global_variables_initializer()
with tf.Session() as sess:
init.run()
for i, color_data in enumerate(test_data):
if i % 1000 == 0:
print('iter:', i)
sess.run(training_op, feed_dict={som.x: color_data, som.n:i})
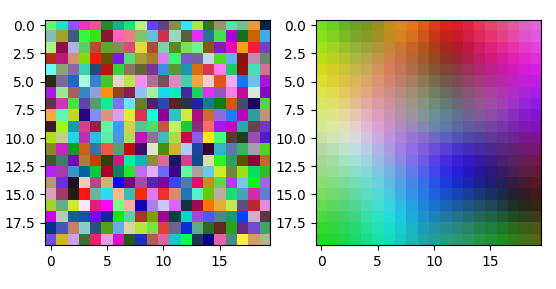
����� �������� ���� ����������� ����������� ������� ������������ ������ � ���������� ����������� �����, ��� ������ ����� ����� ������ ������ ����� �������������� ������� �� ����� ������� ����� ��������������� ������� ����� (������������ ���� ������ �������� ���������� ����������� �������). ��� ������������ ����� ����������� ������ ������������� ����� �������� ��� �������� ����������� �����������.
�� ������� ������������ ����� ����� ��� ���� 20�20 ��������, ����� 200���. �������� ��������:
����� ����� � ������ �������� (�����) � � ����� �������� (������).
����� ����� ��� ���� 100x100 ��������, ����� 350���. �������� ��������.
����������
� ����� ������� ������������������ ����� � ������� ������ �� �������� �� ������� ������� ��������� �� ���� ���������. ��� �������� ���� ����� ������������ ������ ����� �����������. ��� �� ����� ������������� �������� ��� ������ � �������� ������. ��� ���� ������� ������������� ���� ������� ������ �� ������ �� ������������� ����� ����� ��������� � ��� ������������� � ��������� ��������� �������� �������� �� ��������.
P.S.: ������ ��� ��������� ����� �����
���.

https://habrahabr.ru/post/334810/