OMower c ROS, первые шаги
|
|
Вторник, 01 Января 2019 г. 23:14
+ в цитатник
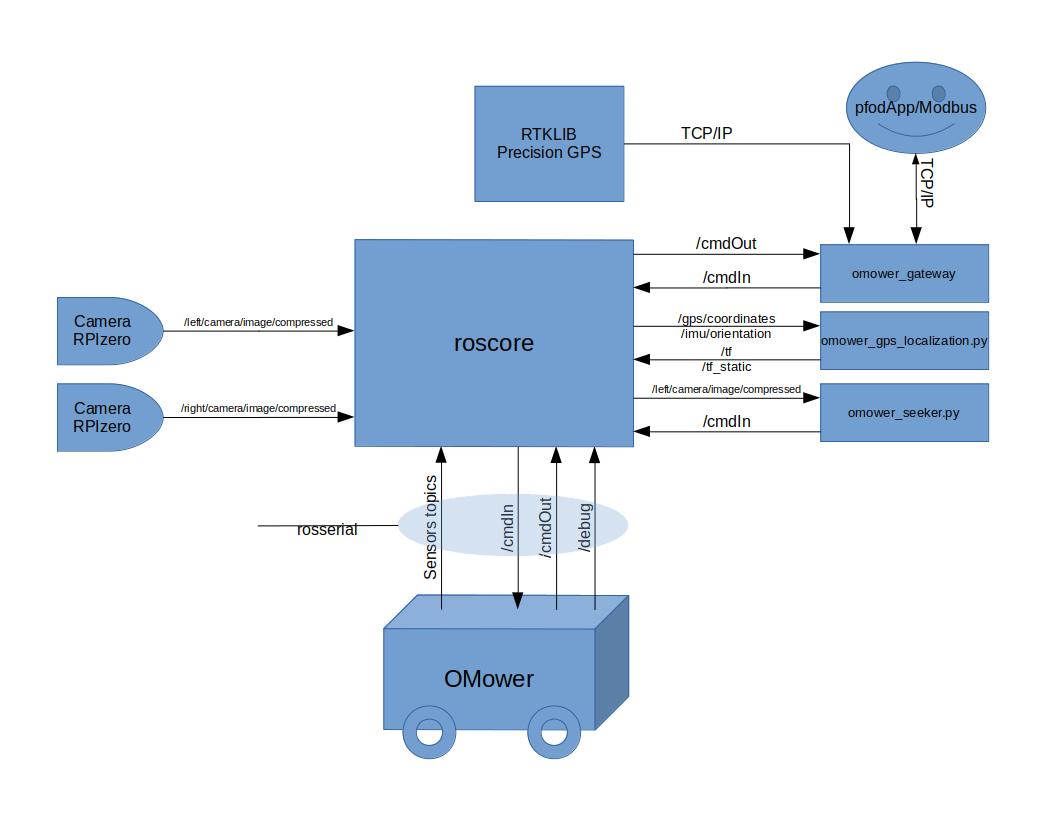
Первоначально, OMower разрабатывался под простые интерфейсы управления pfodApp и Modbus. Первый — это текстовый протокол высокого уровня, в котором передаются менюшки и управляющие команды, а второй — известная, но не слишком удобная в данном применении вещь, так как требует от управляющей программы постоянно опрашивать состояние всех используемых датчиков «вручную». Поэтому, было принято решение постепенно переходить на ROS (Robot OS), широко используемый фреймворк для управления различными роботами.
 Читать дальше ->
Читать дальше -> https://habr.com/post/434952/?utm_source=habrahabr&utm_medium=rss&utm_campaign=434952
-
Запись понравилась
-
0
Процитировали
-
0
Сохранили
-







