Ардуино головного мозга: импульсный датчик положения
|
|
Среда, 18 Октября 2017 г. 22:18
+ в цитатник
Задача на сегодня: как определить угол поворота инкрементального энкодера?
Сегодня в серии публикаций про ардуино головного мозга коротенькая статья с небольшим экспериментом и парой рецептов. В комментариях к одной из моих прошлых статей
меня обвинили в том, что ардуиной подсчитывать импульсы энкодера — фу так делать:
Оптически энкодер 1000/оборот и ATMega не имеющая аппаратной схемы работы с энкодером (как у серий STM32, например) — это тупик.
Дальше в комментариях было много теоретизирования, которое лучше пропустить. Давайте лучше попробуем протестировать в железе, насколько это тупик. Для начала, что такое инкрементальный энкодер? Тот, кто помнит эпоху до-оптических мышек, ответ знает точно.
Внутри энкодера есть диск с прорезями, вот для наглядности я сделал фотографию диска с пятьюстами прорезями:
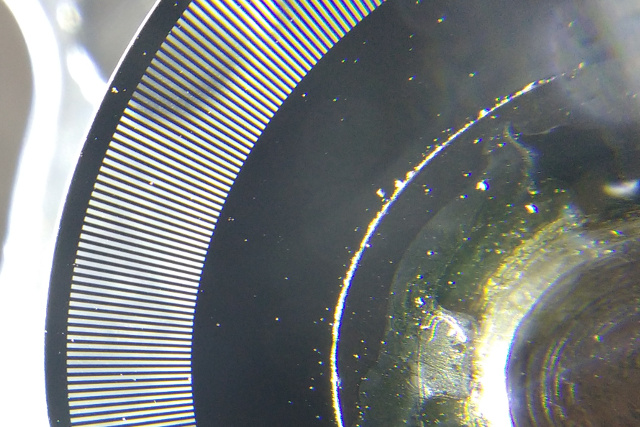 Читать дальше ->
Читать дальше -> https://habrahabr.ru/post/340448/
Метки:
author haqreu
разработка робототехники
программирование микроконтроллеров
программирование
алгоритмы
c++
ардуино головного мозга
quadrature decoder
-
Запись понравилась
-
0
Процитировали
-
0
Сохранили
-






