Стальной манипулятор HEXAPOD
|
|
Воскресенье, 29 Марта 2015 г. 19:04
+ в цитатник
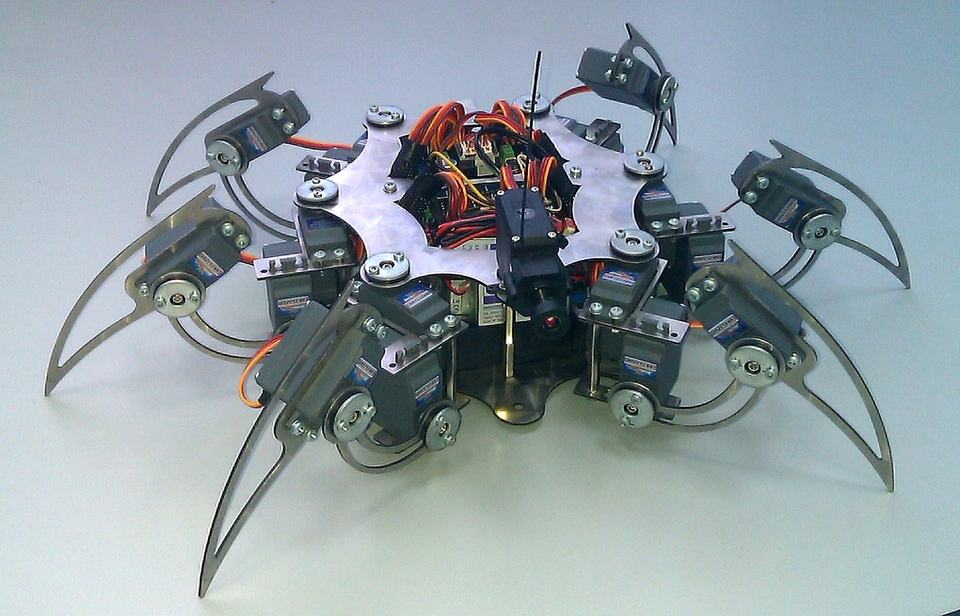
В последующем изложении хотел бы продемонстрировать реализацию шестиконечного манипулятора HEXAPOD, выполненного из корабельной стали. Текущий проект не претендует на оригинальность, инновационные подходы, реализацию сложных алгоритмов управления, использования математических моделей поведения, а так же изначальное проектирование уже существующих и эффективно работающих аппаратных средств. В текущей статье я постараюсь изложить собственный подход к реализации манипулятора из максимально доступных средств и материалов периферийного города.
Читать дальше → http://habrahabr.ru/post/254315/
Метки:
Программирование робототехники
DIY или Сделай Сам
hexapod
diy
robotics
-
Запись понравилась
-
0
Процитировали
-
0
Сохранили
-






